 剖析MSP430电容触摸系统驱动电路 —电路图天天读(167)
剖析MSP430电容触摸系统驱动电路 —电路图天天读(167)
电路图基础2026-03-07
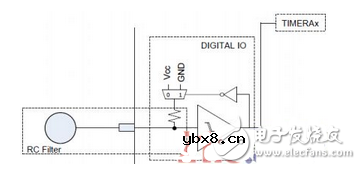
电容触摸技术作为一种实用、时尚的人机交互方式,已经被广泛的应用到各种电子产品,小到电灯开关,大到平板电脑、触摸桌等。随之而来的是考验产品设计者如何发挥智慧,在把产品用户界面设计得方便简洁的同时,
 三种传感电子电路设计详解
三种传感电子电路设计详解
电路图基础2026-03-07
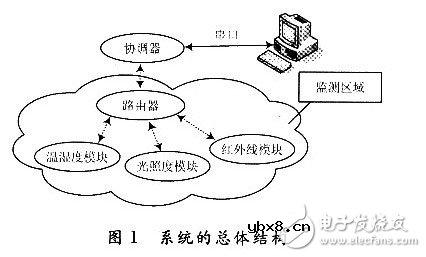
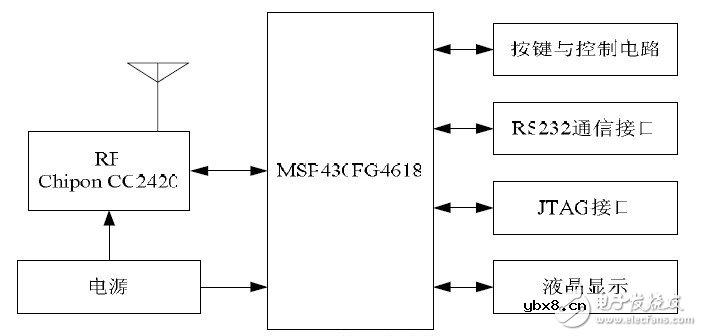
本文设计实现了一种以CC24 30为核心的无线传感器网络。其中,传感器模块包括有温湿度传感器SHTll、红外传感器BS520、光照度传感器PGM5506。
 揭秘智能控制云台主控与驱动电路 —电路图天天读(170)
揭秘智能控制云台主控与驱动电路 —电路图天天读(170)
电路图基础2026-03-07
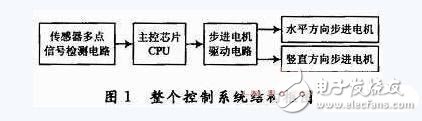
云台一般分两类,一类是做高速运转的球形摄像机,价格昂贵;另一类是以两个交流或直流电机组成的安装平台,通过控制系统在远端可以控制其水平和垂直方向的转动,实现全方位监控,这样的云台控制起来费时费力,
 温度采集系统电子电路设计攻略 —电路图天天读(171)
温度采集系统电子电路设计攻略 —电路图天天读(171)
电路图基础2026-03-07
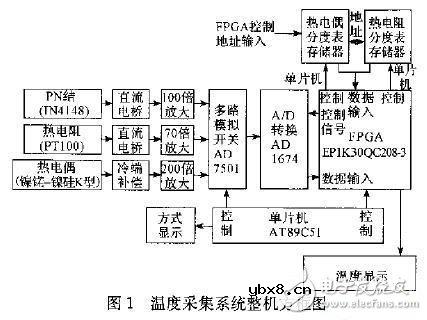
目前市场中大多数温度采集卡的测量范围、测量方式及测量精度在出厂时就已经固定。测量方式单 、测量范围固定、传感力式也只能适应一定的场合。因此不能很好的适用一些多测量方式及测量范围的场合。再者它们的
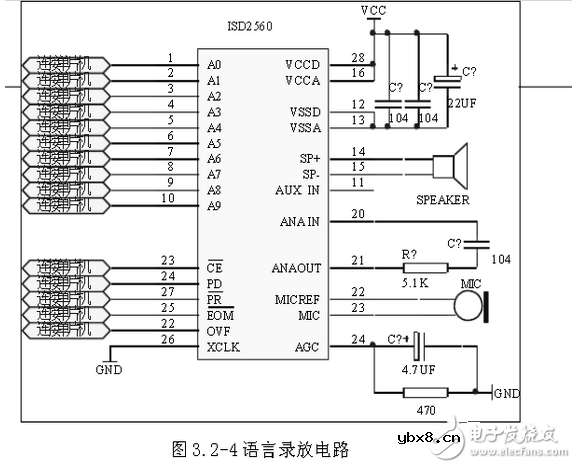 采用ISD2560芯片的语言录放电路
采用ISD2560芯片的语言录放电路
电路图基础2026-03-07
语言提示电路 ISD2560芯片采用多电平直接模拟量存储专利技术,每个采样值直接存储在片内单个E2PROM单元中,不需另加A/D或D/A变换来存储和重放,能够非常自然、真实地再现语音,音乐,音调和效果声,避免
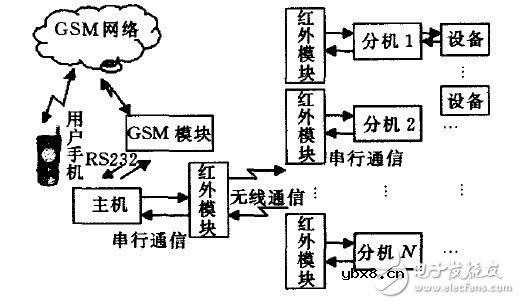 智能家居远程控制系统电路设计攻略 —电路图天天读(172)
智能家居远程控制系统电路设计攻略 —电路图天天读(172)
电路图基础2026-03-07
本系统是基于红外和GSM 网络的用于智能家居环境中的一种远程自动控制系统。其工作原理为:用户通过自身的手机发出命令短消息,在家值守的GSM模块接收到命令后发送给主机(单片机),主机通过对命令的处理,把
 超声波测距电子电路设计详解 —电路图天天读(176)
超声波测距电子电路设计详解 —电路图天天读(176)
电路图基础2026-03-07
在自主行走机器人系统中,机器人要实现在未知和不确定环境下行走,必须实时采集环境信息,以实现避障和导航,这必须依靠能实现感知环境信息的传感器系统来实现。视觉、红外、激光、超声波等传感器都在行走机器
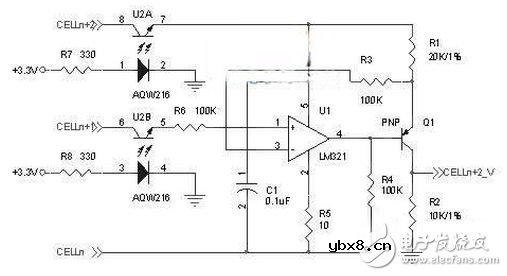 电压检测与接口电路设计原理图
电压检测与接口电路设计原理图
电路图基础2026-03-07
串联电池组广泛应用于手携式工具、笔记本电脑、通讯电台以及便携式电子设备、航天卫星、电动自行车、电动汽车、储能装置中。为了使电池组的可用容量最大化及提高电池组的可靠性,电池组中的单体电池性能应该一
 ZigBee无线呼叫系统硬件电路 —电路图天天读(177)
ZigBee无线呼叫系统硬件电路 —电路图天天读(177)
电路图基础2026-03-07
ZigBee 技术是一种近距离、低复杂度、低功耗、低数据速率、低成本的双向无线通信技术,主要适用于自动控制和远程控制领域,是为了满足小型廉价设备的无线联网和控制而制定的。ZigBee 是一种用于无线连接的全球
 智能机器人红外发送接收电路详解
智能机器人红外发送接收电路详解
电路图基础2026-03-07
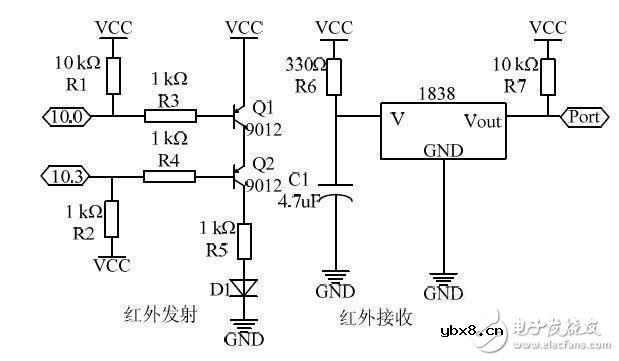
该移动音乐机器人以英飞凌16 位单片机XE162FN 处理器为核心,英飞凌开发的16/32 位微控制器具有高度系统集成、无需外设附加器件及相关软件开销、提供系统安全和故障保护机制等功能。蓝牙是一种全球开放性的、
 变频器控制电路设计及其原理分析
变频器控制电路设计及其原理分析
电路图基础2026-03-07
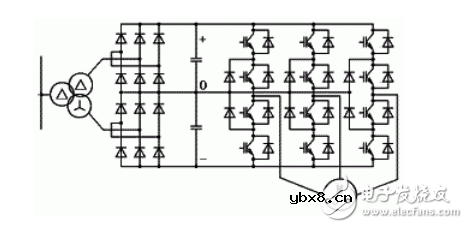
变频器的电路一般由整流、中间直流环节、逆变和控制4个部分组成。整流部分为三相桥式不可控整流器,逆变部分为IGBT三相桥式逆变器,且输出为PWM波形,中间直流环节为滤波、直流储能和缓冲无功功率。变频器是利
 无线传感电源系统电路设计攻略 —电路图天天读(182)
无线传感电源系统电路设计攻略 —电路图天天读(182)
电路图基础2026-03-07
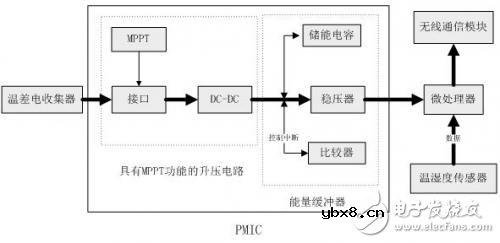
在全球面临能源紧缺、气候变暖等严重问题的情况下,人类为了生存和发展转而去寻找和利用清洁能源技术。清洁能源包括太阳能、风能、热能、振动能、海洋能,以及其他能量如人体动能、生化能等能量。随着科技的发
 变频无线发射机系统电路设计详解 —电路图天天读(188)
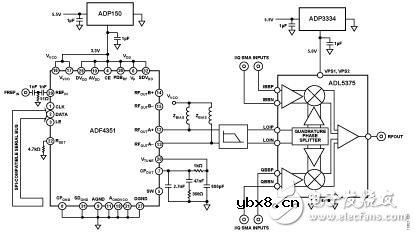
变频无线发射机系统电路设计详解 —电路图天天读(188)
电路图基础2026-03-07
电路为宽带直接变频发射机模拟部分的完整实施方案(模拟基带输入、RF输出)。通过使用锁相环(PLL)和宽带集成电压控制振荡器(VCO),本电路支持500MHz至4.4GHz范围内的RF频率。PLL中的本振(LO)执行谐波滤
 揭秘MC3361+MCU低速通信系统电路 —电路图天天读(190)
揭秘MC3361+MCU低速通信系统电路 —电路图天天读(190)
电路图基础2026-03-07
光纤通信做为一种新兴的高性能的串行通信技术,已经在电力领域逐步展开应用。目前的光纤通信模块大多使用 FPGA 或DSP 技术实现信号解调,虽然其传输速度快、效率高,但是成本高、技术复杂,而且对于传输距离、
 致命干货:41个555定时器经典设计项目
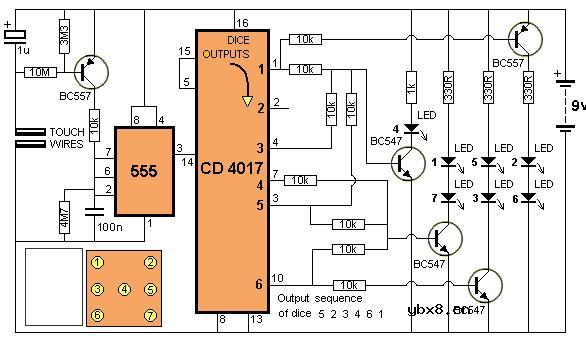
致命干货:41个555定时器经典设计项目
电路图基础2026-03-07
555定时器是一种模拟和数字功能相结合的中规模集成器件。它除了作定时延时控制外,还可以用于调光、调温、调压、调速等多种控制以及计量检测等作用;还可以组成脉冲振荡、单稳、双稳和脉冲调制电路,作为交流
 智能小车图像识别系统电路设计分析 —电路图天天读(198)
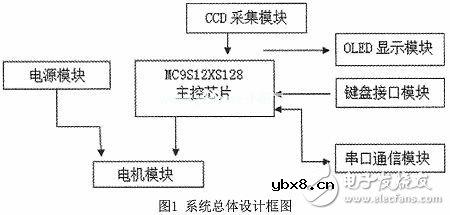
智能小车图像识别系统电路设计分析 —电路图天天读(198)
电路图基础2026-03-07
本文研究的智能小车系统选用了TSL1401CL线性CCD图像采集模块,该模块采用串行通信方式与主控CPU连接,不仅电路简单、性能稳定,而且采集速率快。通过实验测试,本文设计的智能车能根据采集到的图像分析前方路
 函数发生器、信号发生器和波形发生器的区别
函数发生器、信号发生器和波形发生器的区别
时间:2026-06-06
电子元器件的常见封装 各种封装类型的特点介...
时间:2026-06-06
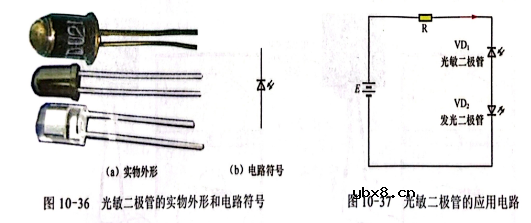 普通光敏二极管的检测
普通光敏二极管的检测
时间:2026-06-06
详细介绍8种常用的排序算法
时间:2026-06-06
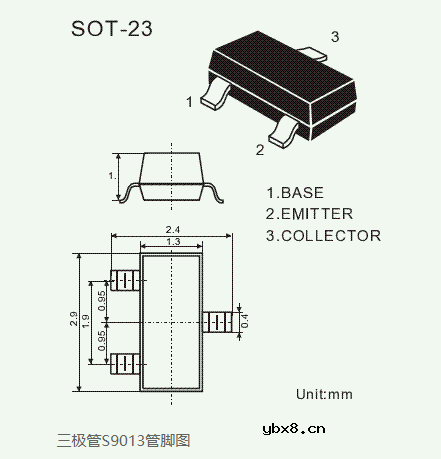 s9013三级管引脚图及参数
s9013三级管引脚图及参数
时间:2026-06-06
电压跟随器有什么作用?
时间:2026-06-06
VRRP是什么?VRRP的作用和工作原理
时间:2026-06-05
 32768晶振封装尺寸详解
32768晶振封装尺寸详解
时间:2026-06-05
静态路由是什么?静态路由如何配置?
时间:2026-06-05
一文详解光耦的作用与分类、使用技巧
时间:2026-06-05
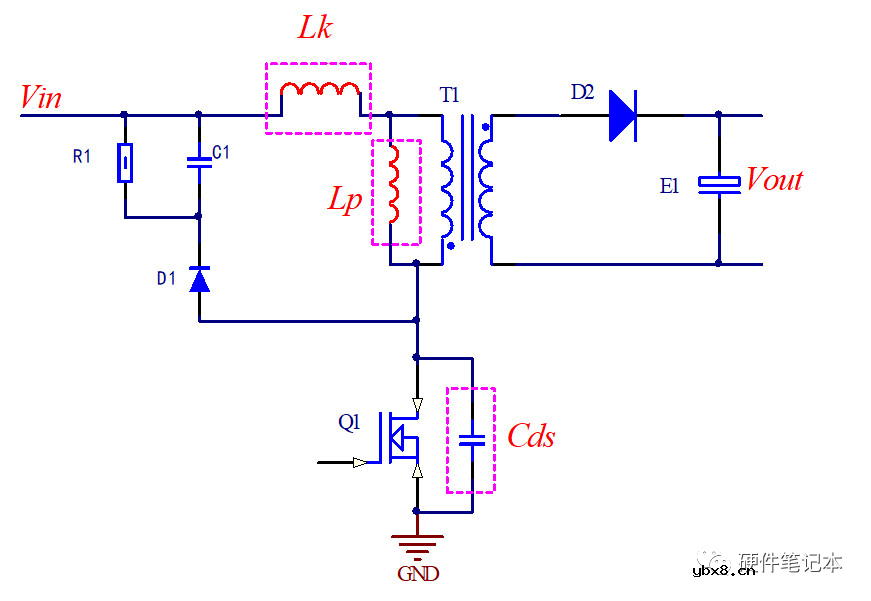 详解RCD钳位电路
详解RCD钳位电路
时间:2026-03-08
三相异步电动机的拆装详讲
时间:2026-03-04
 基于逻辑门的构成解释如何完成任意逻辑的管...
基于逻辑门的构成解释如何完成任意逻辑的管...
时间:2026-03-08
三相异步电动机原理
时间:2026-03-04
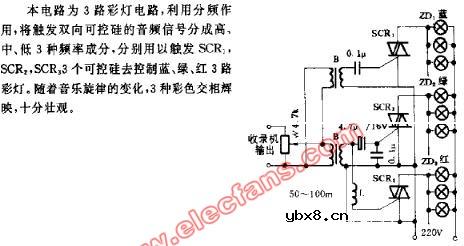 彩灯电路
彩灯电路
时间:2026-03-05
 NE555的有趣电路设计分享
NE555的有趣电路设计分享
时间:2026-03-08
 从0学电路,万用表演示测量三极管方法
从0学电路,万用表演示测量三极管方法
时间:2026-03-08
 光耦在电子电路中作用、关键参数详解
光耦在电子电路中作用、关键参数详解
时间:2026-03-08
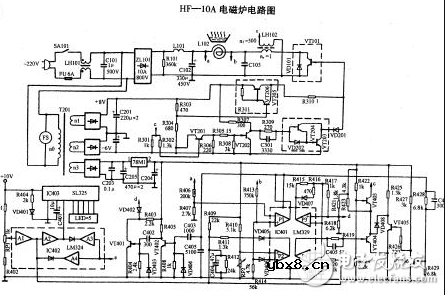 美的电磁炉电路图大全(六款美的电磁炉电路...
美的电磁炉电路图大全(六款美的电磁炉电路...
时间:2026-03-07
 H桥电机驱动电路解析
H桥电机驱动电路解析
时间:2026-03-08