|
变频器程序控制电路图及参数设置
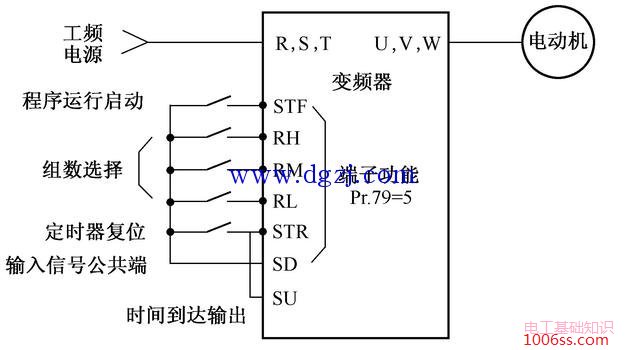
程序控制又称简易PLC控制,它是通过设置参数的方式给变频器编制电动机转向、运行频率和时间的程序段,然后用相应输入端子控制某程序段的运行,让变频器按程序输出相应频率的电源,驱动电动机按设置方式运行。三菱FR-A500系列变频器具有程序控制功能,而三菱FR-A700系列变频器删除了该功能。
一个常见的变频器程序控制运行电路
1.程序参数设置
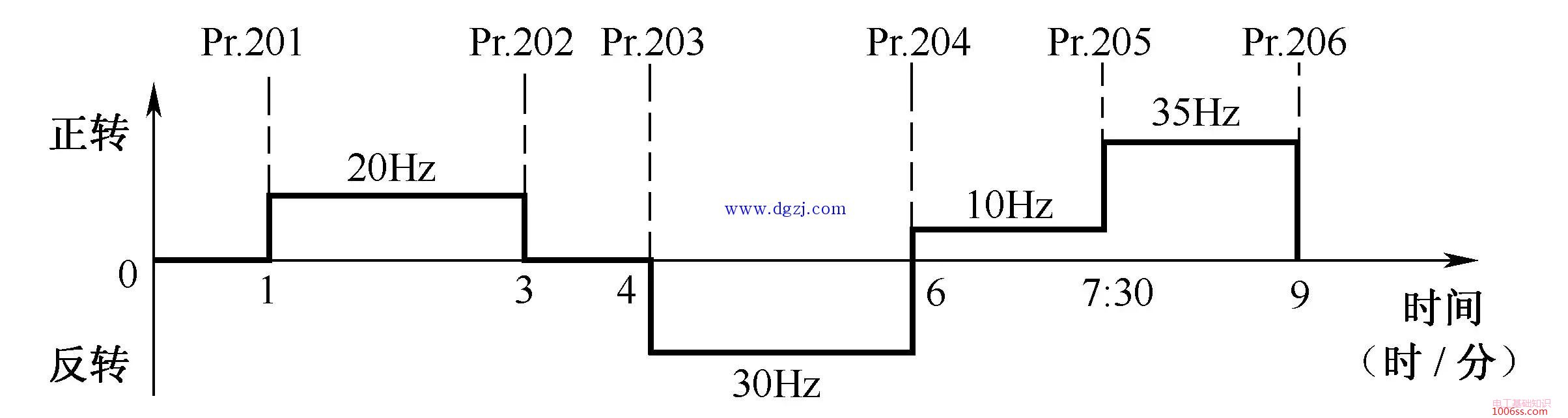
程序运行参数图
设置Pr.79=5,让变频器工作在程序控制模式;
设置Pr.200=1,将程序运行时间单位设为时/分;
设置Pr.201~Pr.206,具体设定值及功能见下表。
|
参数设定值
|
设定功能
|
|
Pr.201=1,20,1:00
|
正转,20Hz,1点整
|
|
Pr.202=0,0,3:00
|
停止,3点整
|
|
Pr.203=2,30,4:00
|
反转,30Hz,4点整
|
|
Pr.204=1,10,6:00
|
正转,10Hz,6点整
|
|
Pr.205=1,35,7:30
|
正转,35Hz,7点30分
|
|
Pr.206=0,0,9:00
|
停止,9点整
|
2.程序运行控制
将RH端子外接开关闭合,选择运行第1程序组(Pr.201~Pr.210设定的参数),再将STF端子外接开关闭合,变频器内部定时器开始从0计时,开始程序运行参数曲线工作。当计时到1:00时,变频器执行Pr.201参数值,输出正转、20Hz的电源驱动电动机运转,这样运转到3:00时(连续运转2h),变频器执行Pr.202参数值,停止输出电源,当到达4:00时,变频器执行Pr.203参数值,输出反转、30Hz电源驱动电动机运转。
当变频器执行完一个程序组后会从SU端输出一个信号,该信号送入STR端,对变频器的定时器进行复位,然后变频器又重新开始执行程序组,按程序运行参数曲线工作。若要停止程序运行,可断开STF端子外接开关。变频器在执行程序过程中,如果瞬间断电又恢复,定时器会自动复位,但不会自动执行程序,需要重新断开又闭合STF端子外接开关。
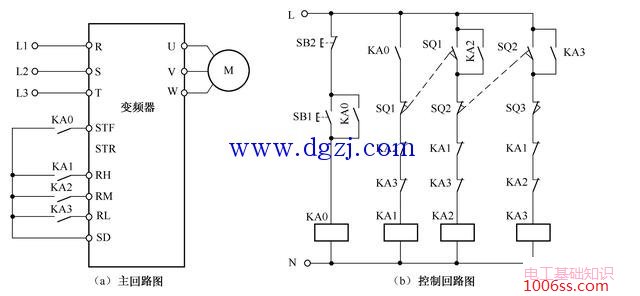
采用了KA0~KA3 4个中间继电器,常开触点接在变频器的多档转速控制输入端,还用了SQ1~SQ3 3个行程开关来检测运动部件的位置并进行转速切换控制。
一个典型的多档转速控制电路
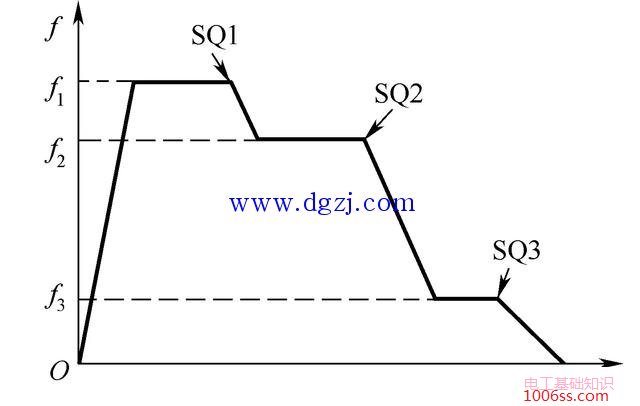
起动并高速运转
高速转中速运转
中速转低速运转
低速转为停转
变频器输出频率变化曲线
多档转速控制说明
变频器的RH、RM、RL为多档转速控制端,RH为高速挡,RM为中速挡,RL为低速挡。RH、RM、RL 3个端子组合可以进行7档转速控制。
2.参数设置
1)多档转速端子选择参数
Pr.180=0,RL端子控制有效;
Pr.181=1,RM端子控制有效;
Pr.182=2,RH端子控制有效。
以上某参数若设为9999,则将该端设为控制无效。
2)多档运行频率参数
|
参数
|
速度
|
出厂设定
|
设定范围
|
备注
|
|
Pr.4
|
高速
|
60Hz
|
0~400Hz
|
|
|
Pr.5
|
中速
|
30Hz
|
0~400Hz
|
|
|
Pr.6
|
低速
|
10Hz
|
0~400Hz
|
|
|
Pr.24
|
速度四
|
9999
|
0~400Hz,9999
|
9999:无效
|
|
Pr.25
|
速度五
|
9999
|
0~400Hz,9999
|
9999:无效
|
|
Pr.26
|
速度六
|
9999
|
0~400Hz,9999
|
9999:无效
|
|
Pr.27
|
速度七
|
9999
|
0~400Hz,9999
|
9999:无效
|
PID控制又称比例微积分控制,是一种闭环控制。
一种典型的PID控制应用电路
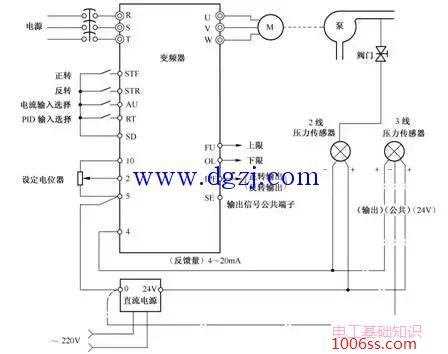
1.PID控制参数设置
|
参数及设置值
|
说 明
|
|
Pr.128=20
|
将端子4设为PID控制的压力检测输入端
|
|
Pr.129=30
|
将PID比例调节设为30%
|
|
Pr.130=10
|
将积分时间常数设为10s
|
|
Pr.131=100%
|
设定上限值范围为100%
|
|
Pr.132=0
|
设定下限值范围为0
|
|
Pr.133=50%
|
设定PU操作时的PID控制设定值(外部操作时,设定值由2-5端子间的电压决定)
|
|
Pr.134=3s
|
将积分时间常数设为3s
|
2.端子功能参数设置
|
参数及设置值
|
说 明
|
|
Pr.183=14
|
将RT端子设为PID控制端,用于启动PID控制
|
|
Pr.192=16
|
设置IPF端子输出正反转信号
|
|
Pr.193=14
|
设置OL端子输出下限信号
|
|
Pr.194=15
|
设置FU端子输出上限信号
|
3.操作运行
设置外部操作模式。设定Pr.79=2,面板“EXT”指示灯亮,指示当前为外部操作模式。
启动PID控制。将AU端子外接开关闭合,选择端子4电流输入有效;将RT端子外接开关闭合,启动PID控制;将STF端子外接开关闭合,启动电动机正转。
改变给定值。调节设定电位器,2-5端子间的电压变化,PID控制的给定值随之变化,电动机转速会发生变化,例如给定值大,正向偏差(ΔX>0)增大,相当于反馈值减小,PID控制使电动机转速变快,水压增大,端子4的反馈值增大,偏差慢慢减小,当偏差接近0时,电动机转速保持稳定。
改变反馈值。调节阀门,改变水压大小来调节端子4输入的电流(反馈值),PID控制的反馈值变化,电动机转速就会发生变化。例如阀门调大,水压增大,反馈值大,负向偏差(ΔX
PU操作模式下的PID控制。设定Pr.79=1,面板“PU”指示灯亮,指示当前为PU操作模式。按“FWD”或“REV”键,启动PID控制,运行在Pr.133设定值上,按“STOP”键停止PID运行。
(责任编辑:admin) |