由于新冠,在过去的一段日子里,大家对于温度的关注超过了以往任何时候。测温成为景点,而无接触方式的测温是诸多需要测体温的公共场合、工厂等采用的最多的检测手段,这对于检测方和被检方都是一种安全的可接受的方式。然而,也不时从网络媒体中看到一些红外测温装置在误测误报,也许是产品设计原因,也许是使用不当原因都不得而知。
本文的主要目的就是让我们对于红外测温的实现过程再了解,尤其是关于其中关键器件红外热电堆传感器的。
红外测温基本原理
还是要搬出红外窗口这张图。

图-1 光波波长和红外窗口
首先要问什么要用红外,而不是其他波段?这是因为,绝对0度以上的万物都会以红外辐射的方式向外辐射能量。对于人体测温,在人类还未进化发出可见光之前,红外辐射却是一大把。
根据斯特藩-玻尔兹曼定律(Stefan-Boltzmann law)中黑体的总辐射度:


再定义一般物体的辐射发射率:


红外热电堆传感器就是用来感测物体辐射能量的眼睛。由于大气中各种吸收成分的(如图-1),为避免这些特定波长范围的能量吸收干扰到信号的转换,就使用各种滤镜避开这些波长。
在热电堆内部,我们可以把它认为是多个串联的基于塞贝克效应的热电偶。不展开了,直接上图(如图-2)。一个热电偶对信号弱,n个串起来就可以用于检测到足够强的信号,而且基于半导体工艺的热电偶灵敏度一般要高于工业用的金属型热电偶。

图-2 热电堆内部构造示意
由于基座是热的良导体,所以示意图中的基座和封装底座的温度被认为是一致的。 热电堆视场角(FOV) 热电堆的FOV可以有两个定义,一个是传感器相对的可视角度(如图-3的a),一个是根据信号测定的角度,即用其在某一环境温度





图-3 热电堆的‘两个’FOV
如果我们将以上的FOV理想化之后,传感器在感测红外辐射时,将有如图-4所示的“取景”范围。

图-4 热电堆的FOV覆盖范围示意
在理想化之后,不妨再设想一下,传感器针对同样一个物体辐射源,在不考虑空气中的各种吸收成分、或者周边物体的辐射反射影响等,传感器与被测物的距离


图-5 理想黑体在FOV范围内对热电堆辐射强度
如果我们将以上的FOV理想化之后,接收面积





其中:



而黑体上任意一小块面积




如果我们设定每个





同时也可以得到传感器部分通过FOV限定的窗口向外辐射能量。如图-7所示。

图-6 传感器在FOV范围内对辐射示意图
图-7中间是面积为A的传感器辐射面,对外的FOV角度为




传感器辐射视为半球全向,而可以通过FOV的立体角对应的辐射功率:

这里功率P的单位为








图-7 FOV和距离对于红外辐射的影响示意图
实际测温时,测量的是一个小区域,而不是一个面。在热电堆的设计中,还需要平衡各种参数。FOV大的时候,测量就变成了一个面,而不是点,好比测量额头温度,成为测量整张脸的平均值了。
热电堆响应特性 我们在图-2中提到,热电堆输出电压信号,是依靠内部热电偶们在两端产生温差的。而热电堆内置的温度传感器测量的是传感器内部环境的温度,而非热电堆吸热部分(热端)的温度,此时比如在吸热层和基座之间存在温差。
如果一直吸热而能量(如式-1)而没有释放的途径,必然会让吸热层温度因为能量的积累而越升越高,以至于传感器无法工作,更不要说测量和响应了。所以传感器所获取的额外能量都通过传感器内部的热传递路径耗散在传感器的周边环境中。而传感器的吸热、散热路径就形成了传感器的响应特性。如图-8所示的结构中,吸热层的热容量为C(J/K),从热端到冷端之间的热阻为K(W/K)。

图-8 热电堆热传递示意图
如果传感器所在的环境热容量足够大,即温度

然而在式-1中的∆P部分,显然都默认的目标温度和传感器温度是不变的,但是Ts传感器的温度和Ta是存在温差的。我们看一下热平衡时,这个温差大概有多大。
传感器每个热电偶灵敏度:S=900μV/K
传感器内部的热电偶对数量:n=160
25℃时测量40℃目标物体温度时输出信号:V=1.5mV
将以上参数带入下面的等式有:

得到:

可见这个温差是很小的,正是因为两个温度相差很小,在很多计算中,直接将热电堆吸热部分的温度和传感器周边温度(NTC测量所得)等同了。不过在式-2中的





如果环境温度为25℃,则Ta=273.15+25=298.15K。


这个一个典型的延迟系统的阶跃响应。令:


图-9 幅值标幺化后的伯德图
这种系统的优点就是对于一般的低频输入怎么着都抖不起来。其通解为下式所示。


图-10 幅值标幺化后的阶跃响应
其中红色部分的是不考虑泰勒展开项(

热电堆灵敏度(S)特性

图-11 热电堆的灵敏度(25℃环温)[2]
热电堆的灵敏度,有几种表达方式,比如单位是V/W,或者V/K。对输出信号影响最大的就是其非线性,以及随着环境温度变化而变化的特性(可以参考一般产品规格书中的灵敏度温度系数)。
在这种特性下,如果工作温度范围所及范围没有进行校准,其测量输出的信号是难以准确的。比如,虽然在GB/T中对红外耳温枪要求的工作温度范围是16℃~35℃,而且实际产品一般都会扩展到比如10℃~40℃,但是这显然无法满足天南海北、春夏秋冬的各种使用环境。
所以要么添加保温降温装置,要么扩展产品的校准温度范围。 如果测量距离较远,环境相对湿度对于测量信号也有影响,不过图-12中的情况感觉有点极端,不太确定其测试条件(如图-12)。GB/T中要求工作在RH≤85%。但如果传感器与被测物距离较近,滤镜选择的波段避开水对红外吸收的波段,那么相对湿度的影响会减少很多甚至忽略。

图-12 相对湿度对热电堆信号的影响[1]
为解决或者减小灵敏度的变化带来的信号变动,需要进行多组信号的测量:
每个环温Ta,测量一组标定黑体温度Tobj对应的信号ΔV;
多个环温,对应多组标定温度。

这里的




这里,


其中


即:


我们可以用一组数据进行初步验证:
Ts=25+273.15=298.15K
Tb=37.5+273.15=310.65K
εobj=0.98(如人体皮肤辐射率)

得到Tobj值和未转换之前的温度Tb相差了0.24K,已然超出了GB/T规定的测量精度要求(±0.2℃)的要求。所以物体发射率的修正是必要的。
总结
以上的分析多基于理想状态进行,实际应用设计过程中需要考虑的因素更多。对信号放大动则成百上千倍的电路设计来说,器件的选择、布线的要求都需要留意并核算是否满足精度、分辨率和稳定性方面的要求。有时候不同焊接点之间的温差都可能引入额外的塞贝克效应变为热电偶,而成为信号放大链路中莫名误差来源。
审核编辑:刘清
 电感器设计流程和见解
电感器设计流程和见解
时间:2026-05-01
 什么是触发器?触发器的作用是什么?
什么是触发器?触发器的作用是什么?
时间:2026-05-01
什么是电源?电源是如何进行分类的?
时间:2026-05-01
电驱动NVH的特点和结构
时间:2026-05-01
什么是霍尔传感器?
时间:2026-05-01
电负性的计算方法
时间:2026-04-30
电导的定义_电导的单位_电导怎么算
时间:2026-04-30
什么是计数器_计数器的作用
时间:2026-04-30
什么是欧姆定律_欧姆定律公式
时间:2026-04-30
RAID是什么?RAID有哪些?
时间:2026-04-30
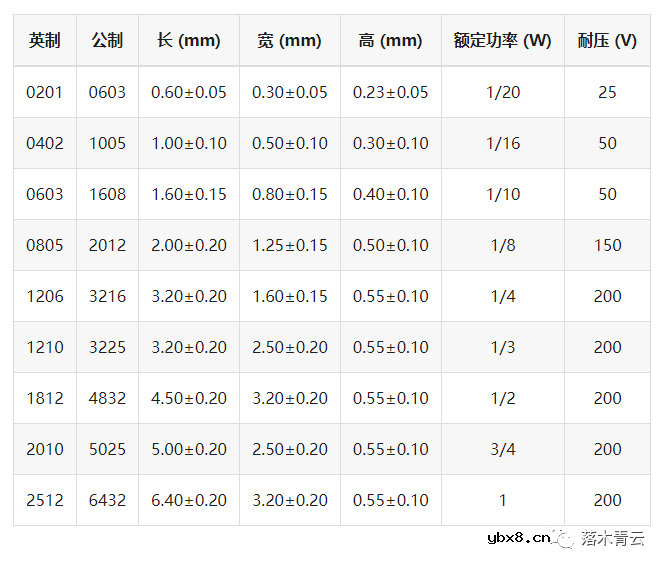 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
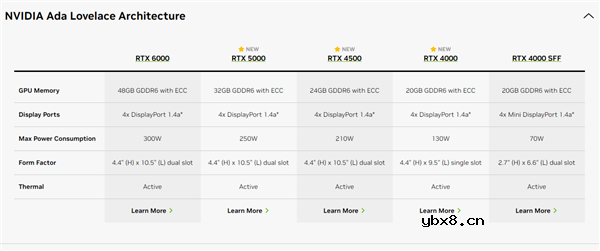 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
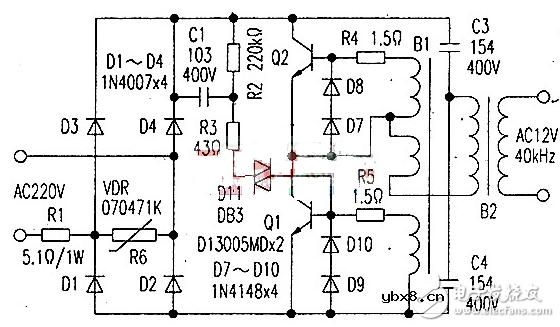 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
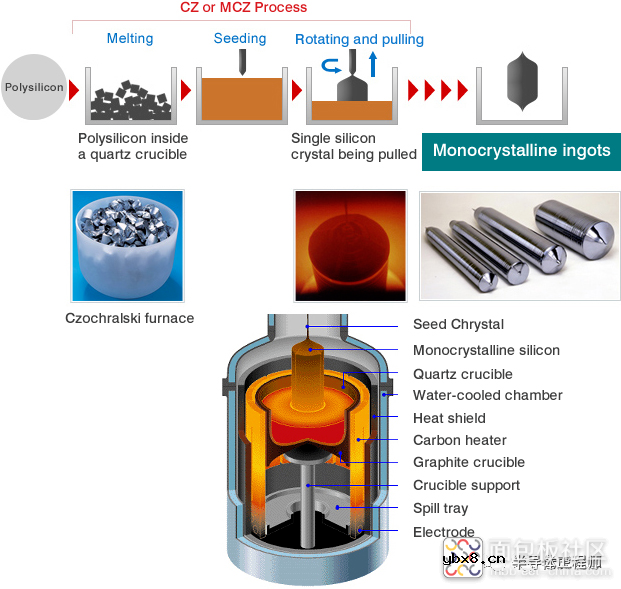 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
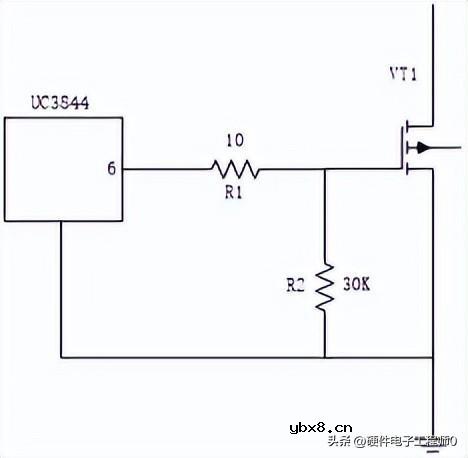 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09
汽车芯片业应汲取的教训
时间:2026-03-09
压敏电阻型号的含义
时间:2026-03-05
半导体行业之ICT技术简介
时间:2026-03-09