仿人机器人具有可移动性,具有很多的自由度,包括双臂、颈部、腰部、双腿等,可以完成更复杂的任务,这些关节要连接在一起,进行统一的协调控制,就对控制系统的可靠性、实时性提出了更高的要求,以往采用的集中控制系统,控制功能高度集中。局部的故障就可能造成系统的整体失效,降低了系统的可靠性和稳定性,因此考虑采用分布式的控制系统来实现系统的控制功能。
电机驱动器的接口电路
驱动器的控制模式可以分为两种:速度控制模式和位置控制模式(通常用电位器作为电机的位置传感器)。这里采用它的速度控制模式,输入的指令信号是0~10 V的模拟量。因此需要用D/A转换电路,把DSP输出的数字量给定转变为模拟信号,电路图如图3所示。DAC7621为12 b并行输入的D/A转换器,它内置参考源,输出范围:0~4.095 V。它的12位输入接DSP数据总线中的D0到D11。它的片选输入管脚可以接DSP的I/O控制线/IS。为了得到0~10 V的模拟信号,还要利用LM358中的一片运算放大器构成的同相比例放大电路,把0~4.095 V的信号放大2.5倍。

如果驱动和控制器不进行隔离,尖峰将破坏控制器电路中的器件,例如RAM。因此,设计了基于线形光耦HCNR201的隔离电路,如图4所示。

线形光耦HCNR201只能起到隔离电流的关系,且输入电流和输出电流呈线性关系。U6B是图3芯片LM358中的另外一片运算放大器,它将输入0~10 V电压转换成20 mA以内的电流信号,输入线形光耦HC-NR201。HCNR201输出电流再经过一个由单电源轨到轨运放AD8519构成的电压跟随器转换成0~10 V电压信号,作为驱动器的模拟信号输入。显然,HCNR201两侧电路应采用不同的电源和地。LM358中的两片运算放大器采用控制器输入的12 V电源供电,而AD8519则采用驱动器输入端提供的10 V电压供电。
增量式编码器信号处理电路
增量式编码器信号处理电路如图5所示。J8是MR编码器的信号输入接口,采用AM26C32把MR编码器输出三个通道的RS 422差分信号转换成TTL电平,得到A,B,Z三路信号。

RS 485总线通信电路
RS 485总线是一种通信总线,TMS320F240 DSP芯片本身不具备RS 485总线接口,采用两个485通信芯片MAX485可以的把TMS320F240的串口RXD和TXD的TTL电平转换为RS 485电平,TMS320F240DSP的RXD和TXD引脚分别连接到第一片485通信芯片RO和第2片485通信芯片DI的引脚。 TMS320F240 DSP 的SPISIMO和SPISOMI连接到MAX485的使能引脚RE,用于控制TMS320F240 DSP芯片的数据发送口挂接到总线上或和总线分离,电路如图6所示。

考虑到机械臂控制系统控制算法的计算量以及多轴协调控制等问题,采用基于RS 485总线的分布式控制的体系结构,见图所示。运动规划算法由主计算机来实现,同时主计算机还将通过RS 485总线与各关节控制器通信,负责各关节控制器的协调工作。每个关节控制器和一台电机、驱动器、检测反馈装置等构成一个位置伺服系统,负责机械臂某一个关节变量的具体控制任务。
相关热词:
 函数发生器、信号发生器和波形发生器的区别
函数发生器、信号发生器和波形发生器的区别
时间:2026-06-06
电子元器件的常见封装 各种封装类型的特点介...
时间:2026-06-06
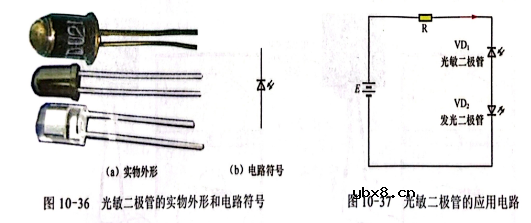 普通光敏二极管的检测
普通光敏二极管的检测
时间:2026-06-06
详细介绍8种常用的排序算法
时间:2026-06-06
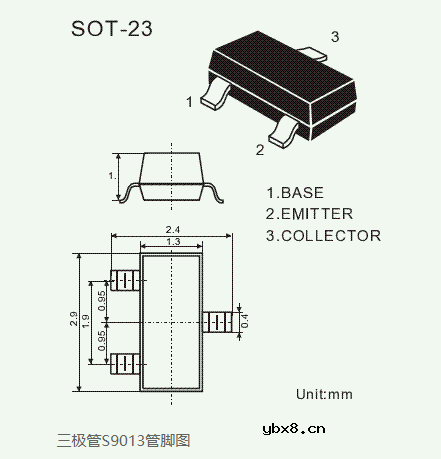 s9013三级管引脚图及参数
s9013三级管引脚图及参数
时间:2026-06-06
电压跟随器有什么作用?
时间:2026-06-06
VRRP是什么?VRRP的作用和工作原理
时间:2026-06-05
 32768晶振封装尺寸详解
32768晶振封装尺寸详解
时间:2026-06-05
静态路由是什么?静态路由如何配置?
时间:2026-06-05
一文详解光耦的作用与分类、使用技巧
时间:2026-06-05
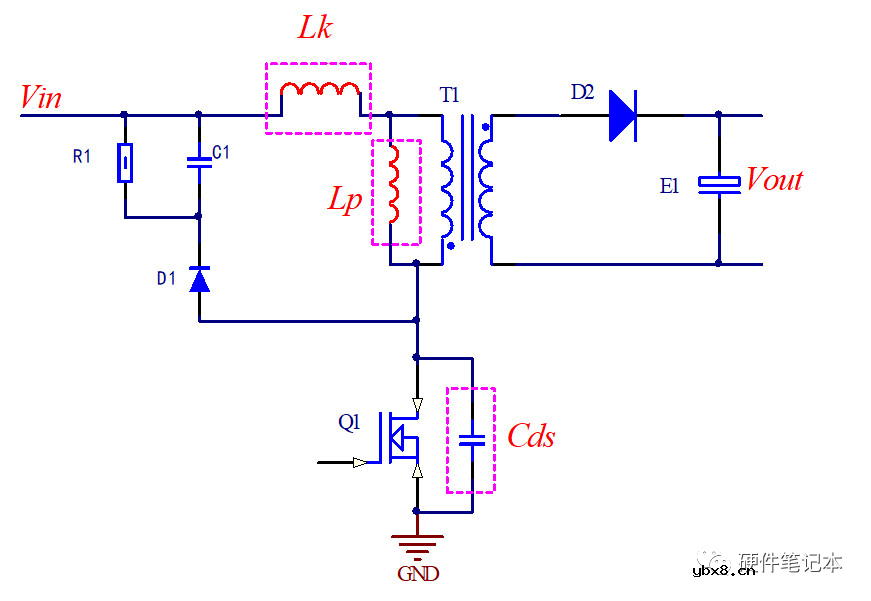 详解RCD钳位电路
详解RCD钳位电路
时间:2026-03-08
三相异步电动机的拆装详讲
时间:2026-03-04
 基于逻辑门的构成解释如何完成任意逻辑的管...
基于逻辑门的构成解释如何完成任意逻辑的管...
时间:2026-03-08
三相异步电动机原理
时间:2026-03-04
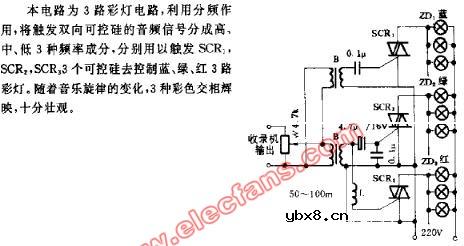 彩灯电路
彩灯电路
时间:2026-03-05
 NE555的有趣电路设计分享
NE555的有趣电路设计分享
时间:2026-03-08
 从0学电路,万用表演示测量三极管方法
从0学电路,万用表演示测量三极管方法
时间:2026-03-08
 光耦在电子电路中作用、关键参数详解
光耦在电子电路中作用、关键参数详解
时间:2026-03-08
 美的电磁炉电路图大全(六款美的电磁炉电路...
美的电磁炉电路图大全(六款美的电磁炉电路...
时间:2026-03-07
 H桥电机驱动电路解析
H桥电机驱动电路解析
时间:2026-03-08