plc步进电机原理图

PLC选用日本松下FP0 PLC,共8点输入(X0~X7),8点输出(Y0~Y7),主要控制主电机Motor1和毛斗步进电机Motor2的工作状态和转速;步进电机选用两相混合步进电动机,步距角1.8°/STEP,用于驱动主机和毛斗;步进电机驱动器选用DMD402,电源电压DC14V~40V,其作用是根据PLC的控制指令对电机实现脉冲和方向控制。FP0系列PLC除具有一般逻辑控制与运算功能外,还具有高速计数输入(最大10kHz)、PLS脉冲直接输出、SPD位置控制、PWM脉冲输出等特殊处理功能,用于步进电机的速度控制或位置按制十分方便。
在图3所示系统中:PLC输出口Y0、Y1以脉冲速率方式输入步进电机驱动器的Pulse input端,控制梳理机主电机和毛斗电机转速和位移。PLC输出口Y2、Y3以方向信号输入到驱动器Directional input端,控制梳理机电机的转向。输出点Y4、Y5是步进电机复位信号RST,每次开机对步进电机驱动器清零。PLC输入点X0以梳理机喂入量斗处的红外传感器作为输入信号,可调节喂入量斗的喂毛量。X1、X2作为步进电机的启动信号,X3作为步进电机复位信号。X4以为位置传感器作为输入信号,检测梳理机是否复位。可以利用当需要手动操作时,可通过PLC的手动输入信号X5、X6,以点动方式按制电机的正转或反转。控制关系为:X5=ON,电机正转;X6=ON,电机反转。
相关热词:#plc
 VRRP是什么?VRRP的作用和工作原理
VRRP是什么?VRRP的作用和工作原理
时间:2026-06-05
 32768晶振封装尺寸详解
32768晶振封装尺寸详解
时间:2026-06-05
静态路由是什么?静态路由如何配置?
时间:2026-06-05
一文详解光耦的作用与分类、使用技巧
时间:2026-06-05
热插拔是什么?热插拔有哪些特点?
时间:2026-06-05
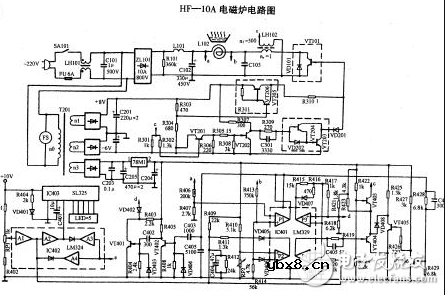
深度解析电磁炉的工作原理与常见故障
时间:2026-06-04
介绍电流互感器的6种常见接线方法
时间:2026-06-04
VGA接口的详细解读和应用
时间:2026-06-04
物联网新兴薄膜技术
时间:2026-06-04
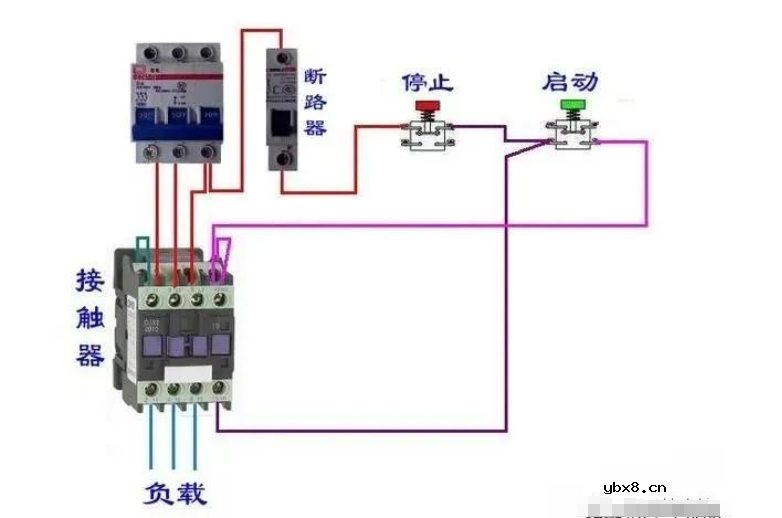 接触器的规格、原理结构、应用接线
接触器的规格、原理结构、应用接线
时间:2026-06-04
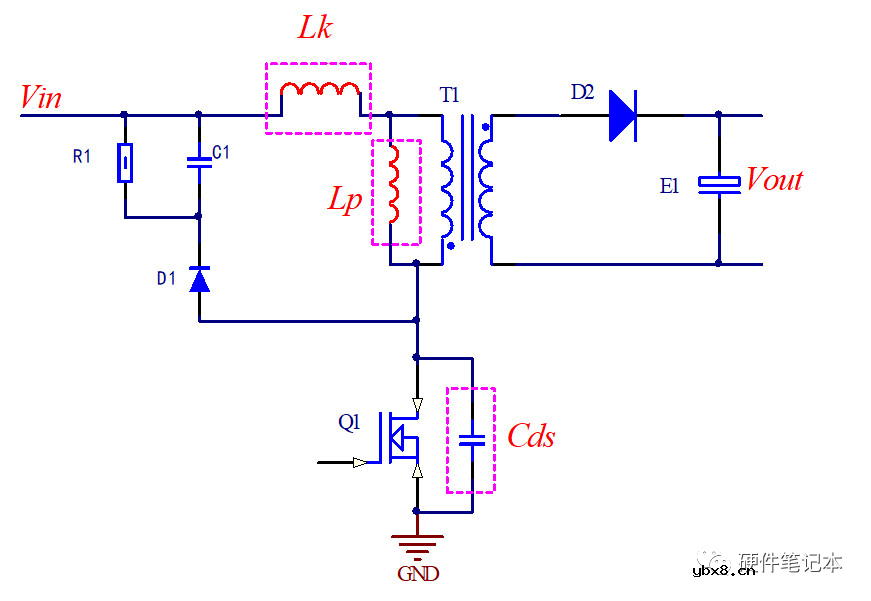 详解RCD钳位电路
详解RCD钳位电路
时间:2026-03-08
三相异步电动机的拆装详讲
时间:2026-03-04
 基于逻辑门的构成解释如何完成任意逻辑的管...
基于逻辑门的构成解释如何完成任意逻辑的管...
时间:2026-03-08
三相异步电动机原理
时间:2026-03-04
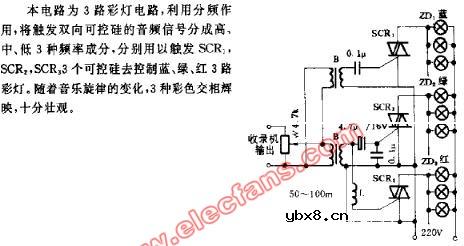 彩灯电路
彩灯电路
时间:2026-03-05
 NE555的有趣电路设计分享
NE555的有趣电路设计分享
时间:2026-03-08
 从0学电路,万用表演示测量三极管方法
从0学电路,万用表演示测量三极管方法
时间:2026-03-08
 光耦在电子电路中作用、关键参数详解
光耦在电子电路中作用、关键参数详解
时间:2026-03-08
 H桥电机驱动电路解析
H桥电机驱动电路解析
时间:2026-03-08
 美的电磁炉电路图大全(六款美的电磁炉电路...
美的电磁炉电路图大全(六款美的电磁炉电路...
时间:2026-03-07