|
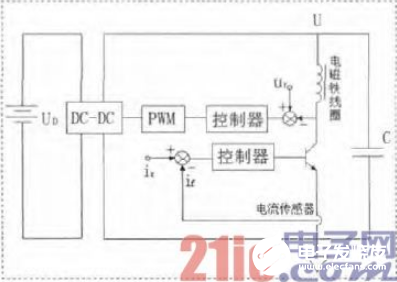
1 引言 磁悬浮技术由于其无接触的特点,避免了物体之间的摩擦和磨损,能延长设备的使用寿命,改善设备的运行条件,因而在交通、冶金、机械、电器、材料等各个方面有着广阔的应用前景。功率放大器作为磁悬浮控制系统的重要组成部分,其作用是控制电磁铁中电流产生电磁力。其性能优劣对磁悬浮控制系统有着显著的影响。 用于磁悬浮控制系统的功率放大器主要有线性功率放大器和开关型功率放大器,前者是指功率器件工作在放大区的功率放大器,其优点是低噪音、结构简单、易于调试、对给定信号跟随特性好,但功率消耗大,效率不高,发热大;后者的功率器件只工作在饱和区和截止区,即只有开、断两种状态,通过控制器调节PWM信号的占空比进而调节流过线圈的电流大小。由于功率器件上只有开关损失以及传导损失,因此开关功放的效率很高,但由于绕组两端电压在若干电压等级之间切换,会导致电流波形失真。 本文介绍的新型混合功率放大器则集合了线性功放以及开关型功放的优点,效率高、速度快、电流脉动小、系统运行稳定。 2 新型混合功率大器的原理 本文介绍的新型混合功率放大器的原理如图1所示:
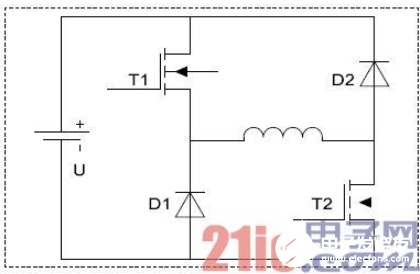
图1 新型混合功率放大器的原理 为了降低功率放大器的损耗,利用电压环使晶体管电压稳定。先检测出晶体管集电极电压,使之与给定电压做比较,得到的偏差信号经过控制器,通过某种控制策略,产生控制信号,之后经PWM环节得到一定占空比的脉冲信号,改变电源电压U,使其在动态时提高功率放大器的电源电压,提高动态响应;在稳态时降低功率放大器的电源电压,降低放大器自身损耗。电流环则起到控制线圈电流的作用。给定值来自位置传感器,与反馈电流比较后,产生的偏差信号被送入控制器,得到晶体管的控制信号,从而控制线圈电流,进而控制电磁铁的电磁力。 当系统处于稳态时,线圈中电流变化小,可忽略电感电压,此时电源电压为: U = iRl+ uT 其中i为线圈电流,Rl为线圈电阻,uT为功率管电压。 当系统处于动态时,位置传感器检测到位置的变化而引起i r的变化,通过与 if比较,从而使晶体管电压uT变化,从而使线圈中的电流跟随给定值变化。而的变化将通过电压环调节功率放大器电源电压,使其保持恒定。此时的电源电压为: U = iRi+ uT+ Ldi/dt 这种混合型功率放大器采用斩波器控制线性放大器电源电压,而放大器的主体采用线性功放,既保留了线性功放噪声低、稳定性好的优点,又克服了其损耗大的不足,将改善整个磁悬浮控制系统的性能。 3 控制电路拓扑 磁悬浮轴承上应用的绕组控制电路拓扑结构主要以桥式电路为主,而桥式电路又分为半桥式电路和全桥式电路。半桥式电路原理如图2所示。
图2 半桥式电路原理 图3 全桥式电路原理
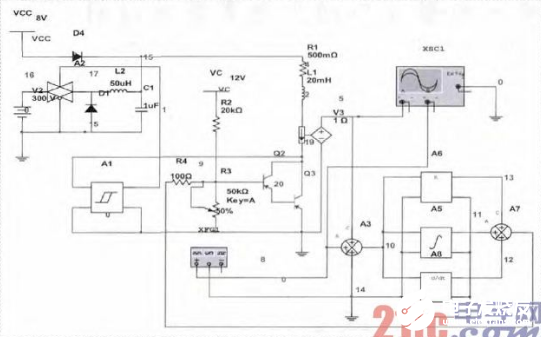
图4 基于MulTIsim的混合功率放大器仿真电路
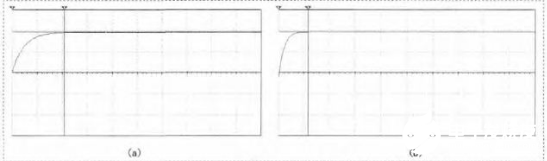
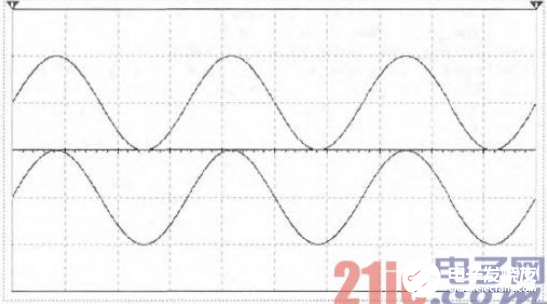
图5 混合功率放大器的阶跃响应
图6 混合功率放大器跟踪特性仿真波形 功率管VT1、VT2同时导通,电路处于充电状态,线圈两端电压为+U,电流增大;VT1、VT2一通一断,则电路处于续流状态;VT1、VT2同时关断,电流经过VD1、VD2回馈电源。 由电路的运行状态可知,半桥式控制电路中,经过线圈的电流是单向的,这显然是不适合应用于磁悬浮控制系统的。全桥式电路原理如图3所示。 T1、T2、T3、T4分别为四个功率管,其中T1、T3工作在开关状态,T2、T4工作在放大状态。T2、T3导通,T1、T4截止时,电流正向流过线圈,电流大小通过T2控制;当T1、T4导通,T2、T3截止时,电流逆向流过线圈,电流大小通过T4控制。 四个功率管截止时,电流通过二极管进行续流。由电路的运行状态可知,全桥式电路可以实现电流的双向流动,满足磁悬浮控制系统的要求。因此选择全桥式电路拓扑结构。 4 混合功率放大器的性能分析 系统的MulTIsim仿真电路如图4所示,L2、C1、D1、V2构成了BUCK变换器,电压环控制采用了滞环控制。V2为电流传感器,XSC1为示波器,A5、A6、A8则构成了PID调节器。功率管集电极反馈电压输入电压滞回模块,控制模拟开关开断,调节占空比,从而达到控制电源电压的目的。直流电源VCC、二极管D4是为了解决BUCK电路占空比低所引起的电压波形变差的问题。当电源电压低于8V,由8V直流电源直接供电。 当给定信号为阶跃信号时,混合功率放大器的仿真如图5所示。其中图(a)、(b)分别为电源电压在300V与400V时的阶跃响应,由图可以清晰地看出,电流的跟踪速度与放大器的电源电压有着密切的关系,电压越高,响应速度越快。 由于复杂的电流波形可以通过不同频率的正弦波叠加而成,因此,将给定的电流信号设定为正弦信号,频率值为1500Hz,电源电压设为300V。系统的仿真波形如图6所示。A曲线为给定值曲线,B曲线为电流传感器测得的实际值曲线,由此可知,实际电流值很好地跟随了给定电流的变化。 结束语 对新型混合功率放大器的原理、拓扑进行了介绍,并通过MulTIsim仿真,对其特性进行了分析。结果表明,新型混合功率放大器效率高、响应速度快,能够满足磁悬浮控制系统的要求。 (责任编辑:admin) |