据麦姆斯咨询报道,近日,中国科学院空天信息创新研究院陈嘉民研究团队开发了一种柔性磁敏触觉传感器,这种传感器模仿了人类皮肤毛发的结构,能够精确地感知接触力,在机器人物体识别和滑动检测方面表现出色,开启了智能机器人感知世界的新篇章。

图1 人类皮肤上的毛发、传感器的结构图和传感器在机器人机械手上的应用 这款传感器的设计独特,由上至下分别是仿生磁性纤毛阵列、柔性聚二甲基硅氧烷(PDMS)薄膜,以及底层集成磁传感器阵列的柔性电路板(FPC)。当有外力触碰磁性纤毛,纤毛周围的磁场会发生变化,通过高灵敏的磁传感器,就能计算出力的大小和方向。其超高的0.2 mN分辨率,稳定的0至19.5 mN工作范围以及毫秒级的响应时间,让这款传感器不仅能测量静态力,还能精准捕捉动态变化。

图2 传感器的制作工艺、不同磁粉含量的纤毛性能表征和传感器电路设计

图3 传感器的各项性能测试结果
当这种传感器被集成到机器人的机械手中,就像给机器人增加了“触觉”。它们能通过机器学习算法识别抓取的物体类型,实验结果显示,其在物体识别方面的准确率高达97%,能够区分物体的形状和内部结构,甚至是否具有磁性。这使得机器人在执行更复杂的任务时,能拥有更加细腻和全面的触感反馈。

图4 传感器在机器人机械手上的滑动检测和物体识别应用
这项成果不仅是仿生学与磁传感技术的巧妙结合,更是智能机器人领域的新探索。它将极大地提升机器人在医疗援助、工业生产、家庭服务等多个场景中的适应性和智能化水平。 相关成果以“Magnetic Tactile Sensor with Bionic Hair Array for Sliding Sensing and Object Recognition”为题发表在国际知名期刊《Advanced Science》上,中国科学院空天信息创新研究院博士研究生满建东为论文第一作者,中国科学院空天信息创新研究院研究员陈嘉民为论文通讯作者。该项工作得到了国家重点研发计划、国家自然基金、北京市自然科学基金会等项目的大力支持。
论文链接: https://doi.org/10.1002/advs.202306832
审核编辑:刘清
 电感器设计流程和见解
电感器设计流程和见解
时间:2026-05-01
 什么是触发器?触发器的作用是什么?
什么是触发器?触发器的作用是什么?
时间:2026-05-01
什么是电源?电源是如何进行分类的?
时间:2026-05-01
电驱动NVH的特点和结构
时间:2026-05-01
什么是霍尔传感器?
时间:2026-05-01
电负性的计算方法
时间:2026-04-30
电导的定义_电导的单位_电导怎么算
时间:2026-04-30
什么是计数器_计数器的作用
时间:2026-04-30
什么是欧姆定律_欧姆定律公式
时间:2026-04-30
RAID是什么?RAID有哪些?
时间:2026-04-30
 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
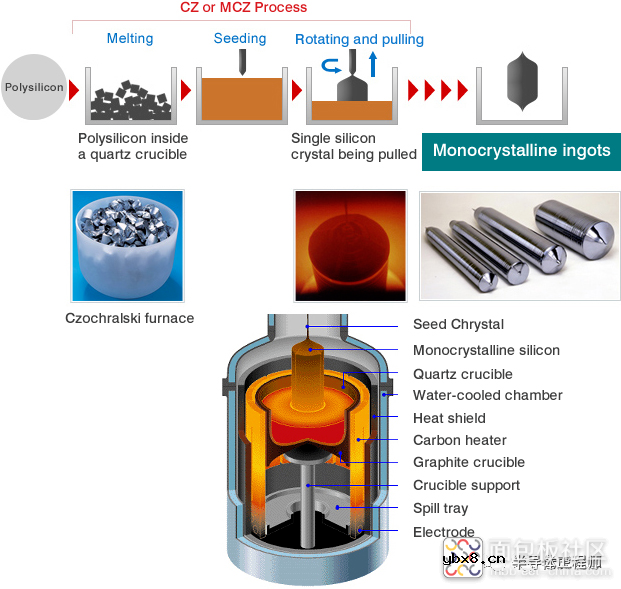 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
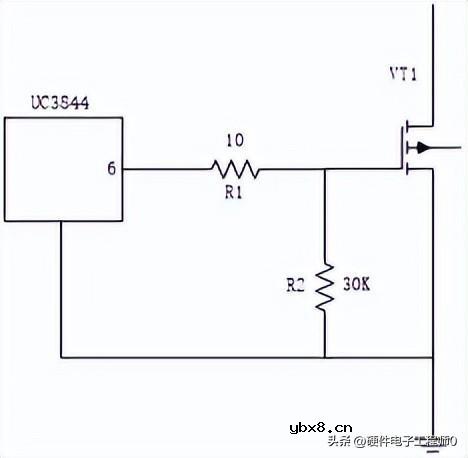 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09
汽车芯片业应汲取的教训
时间:2026-03-09
压敏电阻型号的含义
时间:2026-03-05
半导体行业之ICT技术简介
时间:2026-03-09