2.1 欧拉定理
欧拉定理是刚体定点转动理论中的一个重要定理,它表明刚体绕固定点的任何位移都可以通过绕通过此点的某一轴转过一个角度来实现。在单位时间间隔Δt内,假设刚体的角速度为ω,则该转动轴的方向e及绕该轴转过的角度φ分别为:e = ω/|ω|,φ = |ω|Δt。

相应四元数表示式为:

满足约束条件

以超复数形式表示有:

满足约束条件

利用三角公式:

可将四元数转化成姿态矩阵 b系到R系

可将四元数转化成姿态矩阵 R系到b系

Tips:R系是一种用于描述空间中点位置的导航坐标系,其中的坐标值表示相对于地球的位置。b系是一种用于描述载体(例如航空器、船舶等)位置的坐标系,其中的坐标值表示相对于载体的位置。
3. Matlabe四元数转方向余弦矩阵
API
function[y1,...,yN]=myfun(x1,...,xM)声明名为myfun的函数,该函数接受输入x1,...,xM并返回输出y1,...,yN
q2mat(),qua2dcm(),quat2dcm()将四元数转换矩阵


4.C语言实现四元数转方向余弦矩阵
基于 QMI8658 姿态传感器实现四元数转换为方向余弦矩阵的过程如下:
STEP1: 根据传感器获取到的四元数数据,我们可以得到四元数的四个分量:q0、q1、q2、q3。
STEP2: 我们可以根据四元数的定义,将其转换为方向余弦矩阵。具体的转换公式如下:
| C11 C12 C13 | | C21 C22 C23 | | C31 C32 C33 | 其中,C11、C12、C13、C21、C22、C23、C31、C32、C33 分别表示方向余弦矩阵的九个元素。
STEP3: 我们可以通过串口将获取到的四元数和方向余弦矩阵输出。
以下是基于 QMI8658 姿态传感器获取到的静止放置在水平面,Z轴向上的四元数和方向余弦矩阵数据:

我可以使用Wolfram Alpha计算器进行计算和校验,并给出结果。

审核编辑:刘清
 电感器设计流程和见解
电感器设计流程和见解
时间:2026-05-01
 什么是触发器?触发器的作用是什么?
什么是触发器?触发器的作用是什么?
时间:2026-05-01
什么是电源?电源是如何进行分类的?
时间:2026-05-01
电驱动NVH的特点和结构
时间:2026-05-01
什么是霍尔传感器?
时间:2026-05-01
电负性的计算方法
时间:2026-04-30
电导的定义_电导的单位_电导怎么算
时间:2026-04-30
什么是计数器_计数器的作用
时间:2026-04-30
什么是欧姆定律_欧姆定律公式
时间:2026-04-30
RAID是什么?RAID有哪些?
时间:2026-04-30
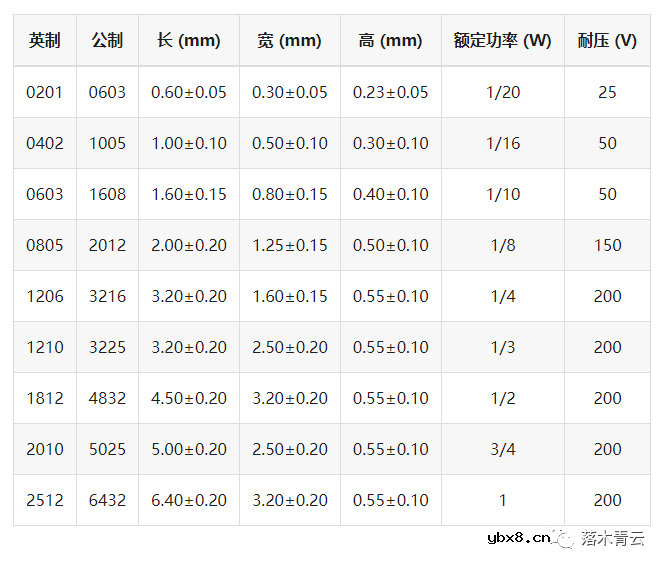 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
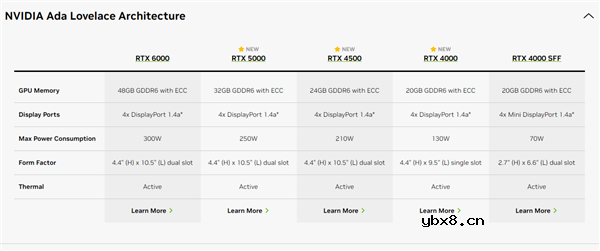 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
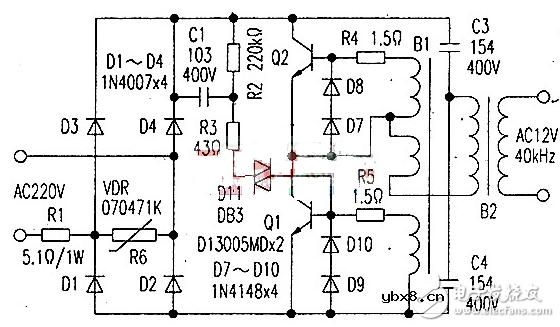 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
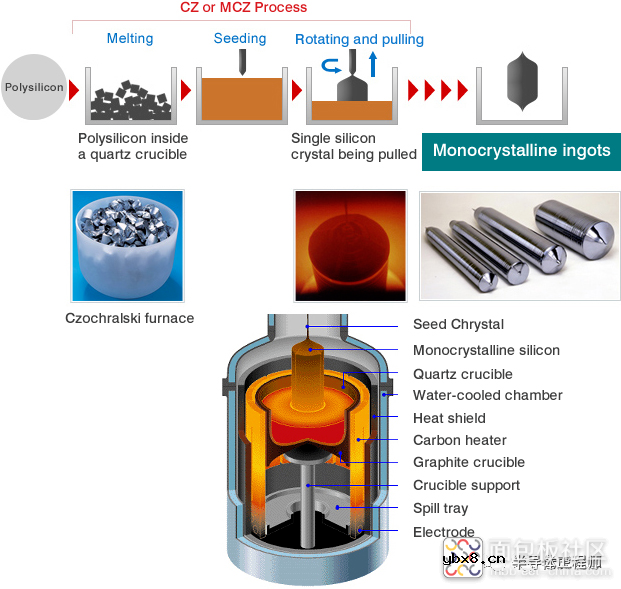 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
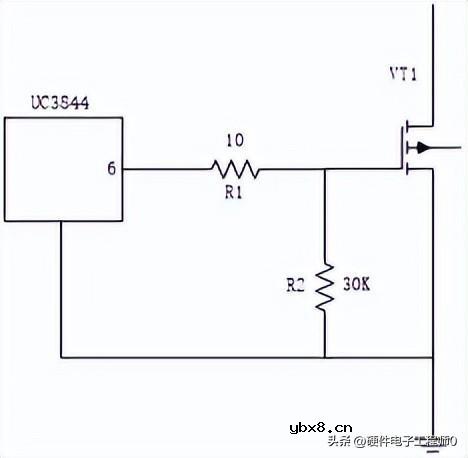 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09
汽车芯片业应汲取的教训
时间:2026-03-09
压敏电阻型号的含义
时间:2026-03-05
半导体行业之ICT技术简介
时间:2026-03-09