摘要
移动机器人需要一种对环境干扰具有鲁棒性的可靠位姿估计器,为此,惯性测量单元(IMU)发挥了重要作用,因为它们可以独立感知车辆的全运动状态。然而,由于固有的噪声和偏置不稳定性,它会出现累积误差,尤其是对于低成本传感器。在我们之前对 Wheel-INS的研究中,本文提出通过在机器人的轮子上安装 IMU 以利用旋转调制来限制纯惯性导航系统 (INS) 的漂移误差。但是,由于缺乏外部校正信号,它仍然在很长一段时间内漂移。
在这篇文章中利用 Wheel-INS 的环境感知能力来实现仅使用一个 IMU 的同时定位和建图 (SLAM)。具体来说,我们使用路堤角度作为地形特征,以使用 Rao-Blackwellized 粒子滤波器实现闭环,根据粒子维护的网格图中的机器人位置,对路堤角度进行采样和存储,根据当前估计的滚动序列与地形图之间的差异更新粒子的权重。实验表明,使用机器人滚动角估计在 WheelINS 中执行 SLAM 的想法是可行的。此外,定位精度比 Wheel-INS 显着提高(超过 30%)

主要贡献
提出并实现了一种Wheel-IMU 使用地形特征(由 Wheel-IMU 测量)的 SLAM 系统。
通过广泛的现场实验说明了利用机器人滚动角估计来实现闭环以有效限制Wheel-INS中的误差漂移的可行性。
据我们所知,这是文献中第一个只为轮式机器人使用一个低成本轮式 IMU 的 SLAM 系统。
相关工作
背景
Wheel-INS [1] 是 Wheel-SLAM 的基础,用于提供机器人里程计和横滚角估计,Wheel-INS 有两个主要优点。首先,轮速可以通过陀螺仪输出和轮半径计算,实现与只使用一个 IMU(无其他传感器)的 ODO/INS 相同的信息融合。其次,它可以利用旋转调制来限制 INS 的误差漂移。由于空间限制,我们在这里仅概述 Wheel-INS 的算法。图2描述了 Wheel-IMU 的安装和相关坐标系的定义。




实验描述
为了证明所提出的Wheel-SLAM系统的可行性和有效性,我们在武汉大学校园内使用一辆汽车进行了五组现场测试。该汽车装有一个Wheel-IMU和参考系统,以提供车辆姿态的真实值,如图5所示。测试中车辆运动的特性如表I所示。







总结
在本研究中,我们提出了一种利用单个轮式惯性测量单元(Wheel-IMU)执行同时定位与地图构建(SLAM)的方法,通过利用Wheel-IMU的环境感知能力,具体而言,我们通过从机器人的横滚角估计中提取地形特征来启用环路闭合检测,从而将我们之前的Wheel-INS方法扩展为Wheel-SLAM。系统采用了Rao-Blackwellized粒子滤波器,每个粒子维护其自己的机器人状态和栅格地图。实验结果表明,所提出的方法能够有效抑制Wheel-INS的误差漂移,相对于Wheel-INS,定位和方向精度平均提高了52.6%和53.2%。
然而,Wheel-SLAM有两个主要限制,首先,需要一定程度的道路沿角变化。其次,机器人必须准确回到同一地点,Wheel-SLAM适用于那些在给定区域内重复移动的机器人,例如清扫机器人和在受限区域内巡逻的机器人, 未来研究方向包括将Wheel-SLAM与其他外部感知传感器(例如相机和LiDAR)集成,以提高机器人导航系统的稳健性和适用性。
审核编辑:刘清
 电感器设计流程和见解
电感器设计流程和见解
时间:2026-05-01
 什么是触发器?触发器的作用是什么?
什么是触发器?触发器的作用是什么?
时间:2026-05-01
什么是电源?电源是如何进行分类的?
时间:2026-05-01
电驱动NVH的特点和结构
时间:2026-05-01
什么是霍尔传感器?
时间:2026-05-01
电负性的计算方法
时间:2026-04-30
电导的定义_电导的单位_电导怎么算
时间:2026-04-30
什么是计数器_计数器的作用
时间:2026-04-30
什么是欧姆定律_欧姆定律公式
时间:2026-04-30
RAID是什么?RAID有哪些?
时间:2026-04-30
 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
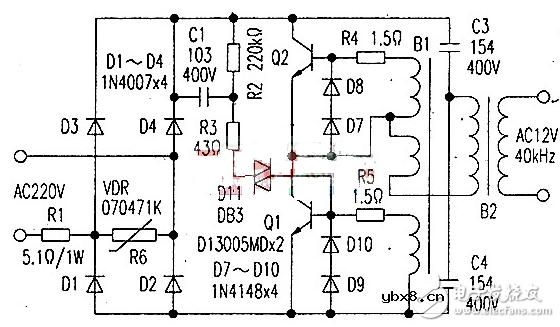 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
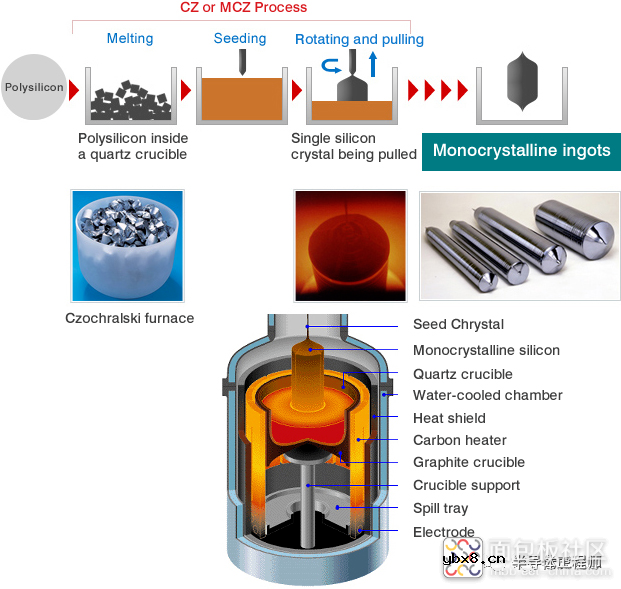 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
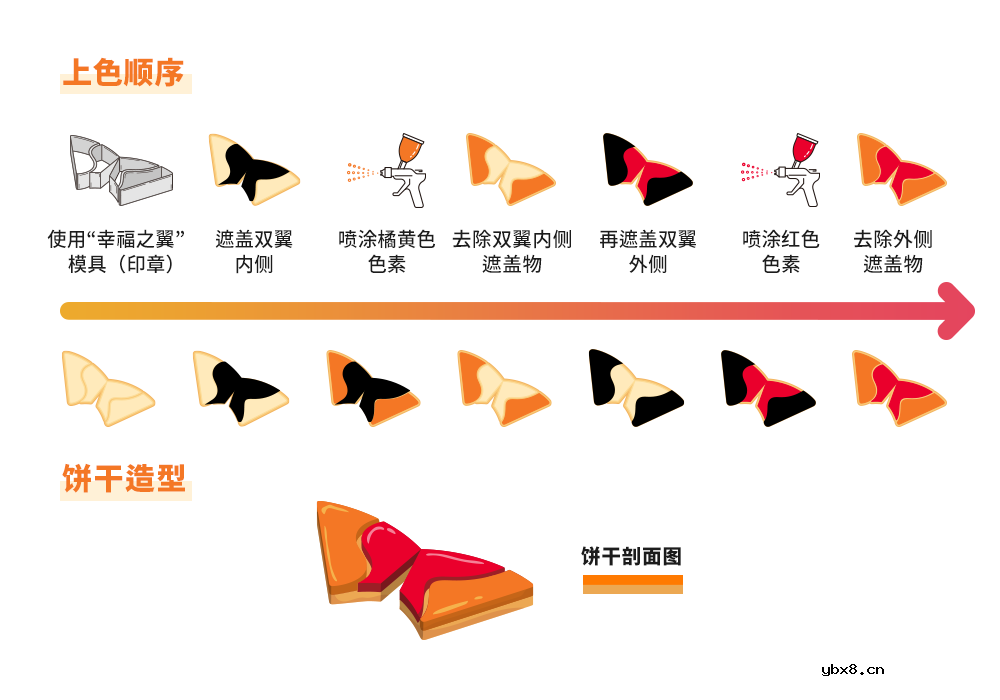 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
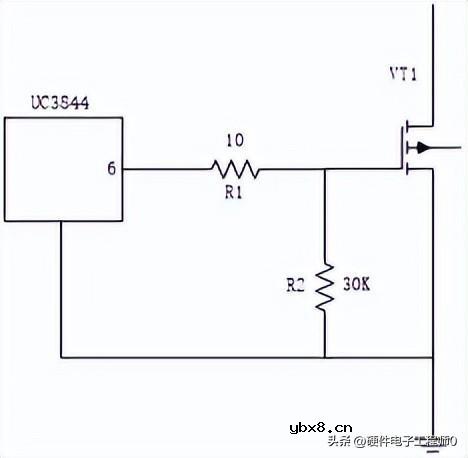 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09
汽车芯片业应汲取的教训
时间:2026-03-09
压敏电阻型号的含义
时间:2026-03-05
半导体行业之ICT技术简介
时间:2026-03-09