一,项目研发背景:
1,21世纪是互联网及AI智能的时代,使用智能机器人来替代巡逻保安来完成单调且不可或缺的巡检是未来的趋势。
2,变电站大都在野外,人工巡检的弊端:错综复杂的道路,位于各处的矮灌木、花坛和雕塑,都容易形成一个个治安死角。普通的人工巡检很容易漏检、错检,特别是在夜间巡检时,又困又累,由于人为因素而错过重要的例行检查也是常有的事;
3,对于电力设备巡检,人工不易发现设备异常或者感受温度异常,人员对火灾探测不敏感。
4,机器人巡检的优点:由于机器人不易疲劳、不易疏忽、不易犯错的缺点,可以预先设定巡检时间、巡检路线、报警方案,便可做到按时寻检,路径全覆盖,死角地带加强扫描的功能,运用传感器物联网,人工智能技术AI 通过图像分析,实时发现异常情况。
二,项目目标
1,本机器人具备红外探测功能,能感受人员不容易发现的高温区,发现火灾苗头进行提高预警;机器人通过4G网络和WIFI6技术实时双模可靠性传送数据到本地端或者远端,PC端或者智能移动设备都可以实时监控控制机器人的运行。
2,智能巡检机器人是可长距离、全方位、自动拍照、视频录制、远程监控的自动预警系统(后期可扩展包括温湿度、烟雾、噪音监测报警、视频图像分析、危险模式识别等),可以最大限度的提供可移动的动态视频画面的采集,实现预置位、巡航线功能,实现与其他视频监控系统集中管理控制的模式;系统设计均符合国家的规范管理的使用要求。
3,控制协议、视频编解码、接口协议、视频文件格式、传输协议均遵循国家标准的规定;从元件、部件的选型到具体的实施方案,都考虑到系统可靠性的问题。
4,本项目采用RA6系列为主控,接受RTK定位信息。RTT-HMI-Board为机器人人机交互控制中枢。让机器人在有无网络连接的情况下都能实现,实时进行图像分析。人脸识别算法。终端侧人工智能的优势包括即时响应、隐私保护增强和可靠性提升。
三,系统架构

四,GUI界面

说明:WiFi或者局域网通过IP 握手连接机器人,用户名登录,权限控制,设定后机器人开始巡检。
开发环境:RT-Thread Studio+ LVGL+e2 studio+fsp_v4_4_0
LVGL的GUI组件主要包括Lable(标签)、Button(按键)、Image(图片)、Image Button(图片按钮)、Keyboard(键盘)、Calendar(日历表)、Chart(数据表)等。
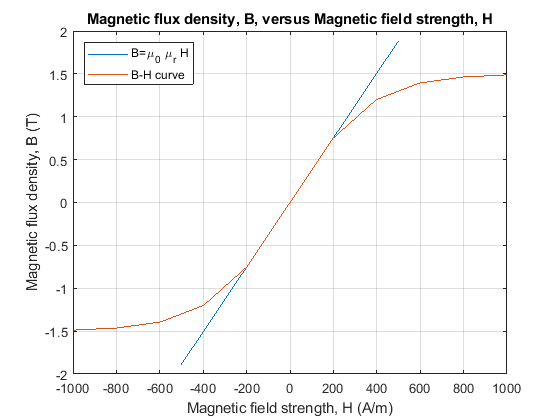 电感器设计流程和见解
电感器设计流程和见解
时间:2026-05-01
 什么是触发器?触发器的作用是什么?
什么是触发器?触发器的作用是什么?
时间:2026-05-01
什么是电源?电源是如何进行分类的?
时间:2026-05-01
电驱动NVH的特点和结构
时间:2026-05-01
什么是霍尔传感器?
时间:2026-05-01
电负性的计算方法
时间:2026-04-30
电导的定义_电导的单位_电导怎么算
时间:2026-04-30
什么是计数器_计数器的作用
时间:2026-04-30
什么是欧姆定律_欧姆定律公式
时间:2026-04-30
RAID是什么?RAID有哪些?
时间:2026-04-30
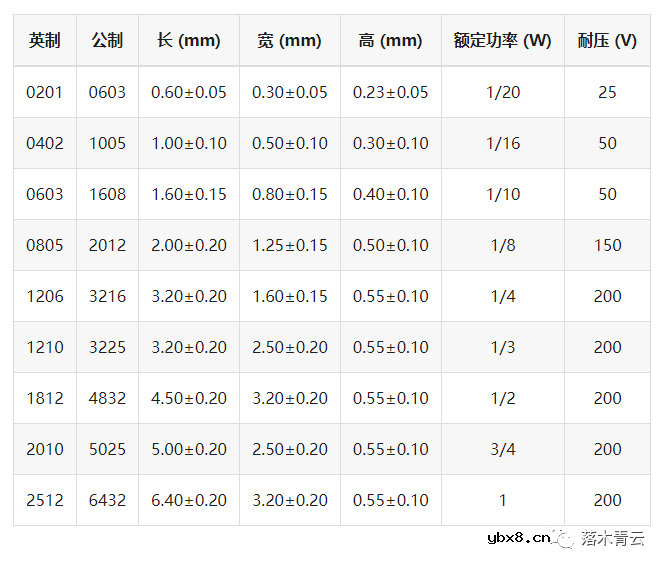 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
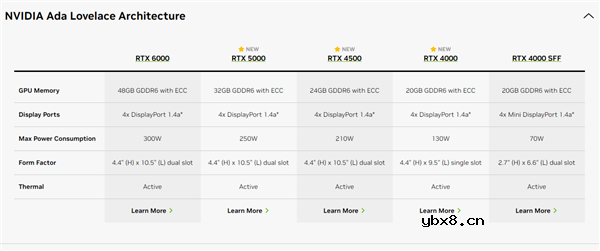 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
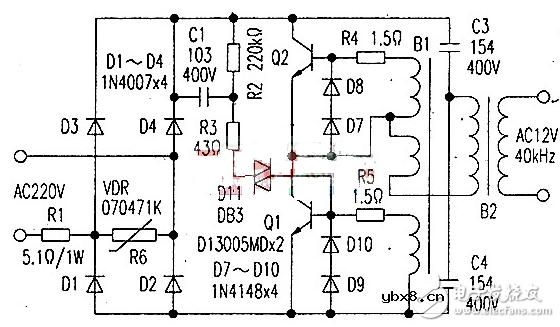 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
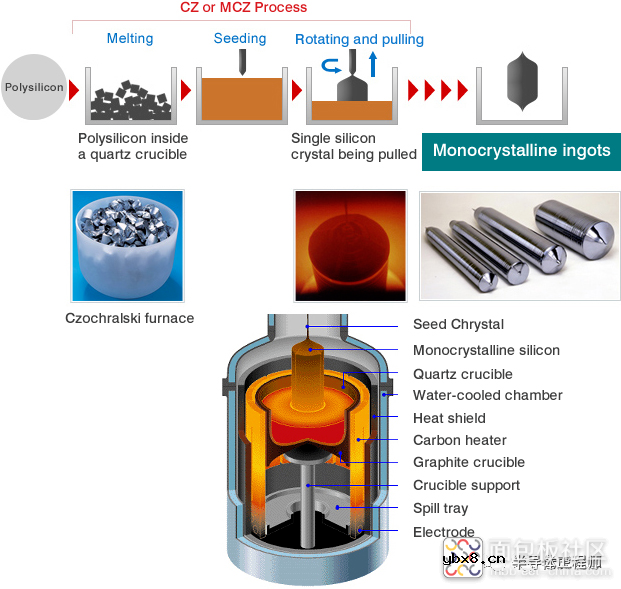 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
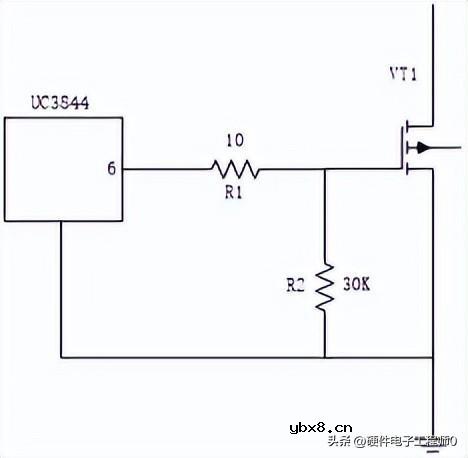 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09
汽车芯片业应汲取的教训
时间:2026-03-09
压敏电阻型号的含义
时间:2026-03-05
半导体行业之ICT技术简介
时间:2026-03-09