人类是视觉动物,凭借双眼获取视觉信息、辨别方向和距离。而当你的汽车帮助你驾驶的时候,什么又是它的“眼睛”呢?
答案是车载传感器。它们持续不断地采集环境信息,然后回传给智能汽车的大脑——计算平台。通过感知算法精准地复现出周围环境,再由决策算法基于对周围环境的认知来进行车辆的路径规划。
今天我们就来说说智驾系统感知层面最常见的几种传感器,它们有什么区别?又如何实现互补?
摄像头
摄像头是最常见的汽车传感器,装在车身四周可以从多角度捕捉环境图像,在90 年代就已开始进入商用并逐渐普及。它也是最接近人眼的传感器,能够获取到丰富的色彩和细节信息,比如车道线,指示标志,红绿灯等等。但是,其局限性也非常明显,如果遇到会暗光、逆光等影响“视线”的情况,摄像头也会像人眼一样看不清从而丢失目标。
同时,视觉感知技术的核心在于通过软件算法去解析高密度的信息,也就是通过“识别”这些物体并“估测”它们的距离。如果遇到一些“不认识”的物体,比如道路上的异形障碍物等,可能会因为无法全面而准确地感知,从而导致系统做出错误的决策。
也正因如此,仅基于摄像头的智能驾驶方案大多停留在L2 阶段,涉及 L3 级别以上的自动驾驶功能仍存在许多 corner case 无法完美解决。这时,就需要其他传感器来进行“互补”。 毫米波雷达
毫米波雷达是一种使用毫米波段进行测距、探测、跟踪、成像的主动传感器。它可主动发射电磁波,穿透烟尘,几乎不受光线和天气影响,帮助车辆实时感知周围物体并提供较为准确的距离和速度信息。
但是,毫米波雷达的感知精度并不理想,不具备图像级的成像能力。因为毫米波雷达是利用在目标物体表面的反射、漫反射和散射来进行目标检测和跟踪,所以对于像行人、动物、自行车这一类低反射率的目标,探测准确度也会大打折扣,路面上的静态物体也可能被当成杂波过滤掉了。
另外,4D毫米波雷达其实也是毫米波雷达的一种,并非什么新物种。相比传统 3D 毫米波雷达而言,4D 毫米波多加了一个高度信息,但是分辨率相比激光雷达来说还是有很大差距。
目前市场上的4D 毫米波雷达每帧约输出 1000 多点,而一个 128 线激光雷达每帧输出可达十几万点,二者输出的数据量相差了 2 个数量级之多。
激光雷达
激光雷达也是一种主动传感器,最常见的ToF (Time of Flight) 测距法,就是通过主动发射激光光束,并测量他们与周围物体反射往返的时间来确定距离和位置。激光雷达通过向外界发出每秒数百万个激光点,可以获取到这些点的三维定位信息,清晰呈现出行人、斑马线、车辆、树木等物体细节,达到图像级分辨率。而且,激光点越密集,分辨率就越高,越能完整且清晰地重构真实世界。
由于其“主动发光”的特性,激光雷达受周围环境光线变化的影响非常小,在一片漆黑的夜间环境也能够“精准洞察”。此外,激光雷达能够直接获取到物体的体积和距离,不像摄像头要靠“猜”,因此针对小型、异形障碍物的检测,应对近距离加塞、隧道、车库等复杂场景,都会有更好的发挥。不过,激光雷达的性能在大雨、雪、雾等极端天气下也会受到一定程度的影响。
综上所述,其实摄像头、毫米波雷达、激光雷达这三种智能汽车上最常见的传感器,各有优缺点。但三个传感器叠加在一起,就能发挥更大的作用。


最后回归到用户需求,一个智能驾驶系统是不是“好用”,还是用户说了算。在感知层面,传感器各有长短版,如何让它们更好地“各司其职”,发挥各自最大的优势才是关键。
审核编辑:刘清
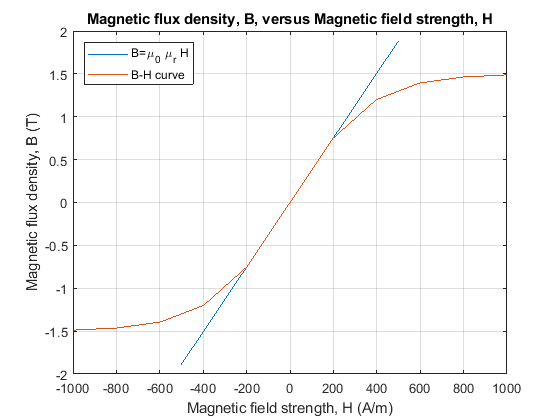 电感器设计流程和见解
电感器设计流程和见解
时间:2026-05-01
 什么是触发器?触发器的作用是什么?
什么是触发器?触发器的作用是什么?
时间:2026-05-01
什么是电源?电源是如何进行分类的?
时间:2026-05-01
电驱动NVH的特点和结构
时间:2026-05-01
什么是霍尔传感器?
时间:2026-05-01
电负性的计算方法
时间:2026-04-30
电导的定义_电导的单位_电导怎么算
时间:2026-04-30
什么是计数器_计数器的作用
时间:2026-04-30
什么是欧姆定律_欧姆定律公式
时间:2026-04-30
RAID是什么?RAID有哪些?
时间:2026-04-30
 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
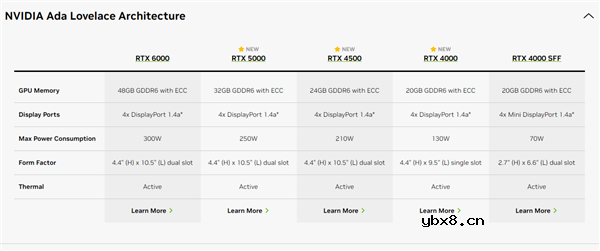 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
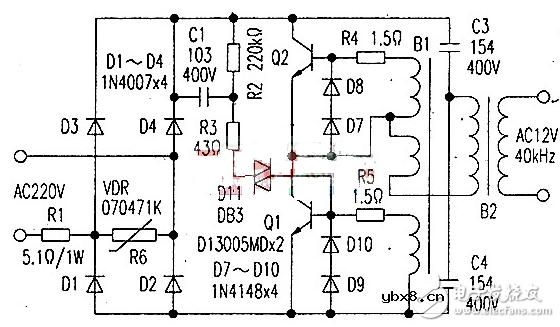 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
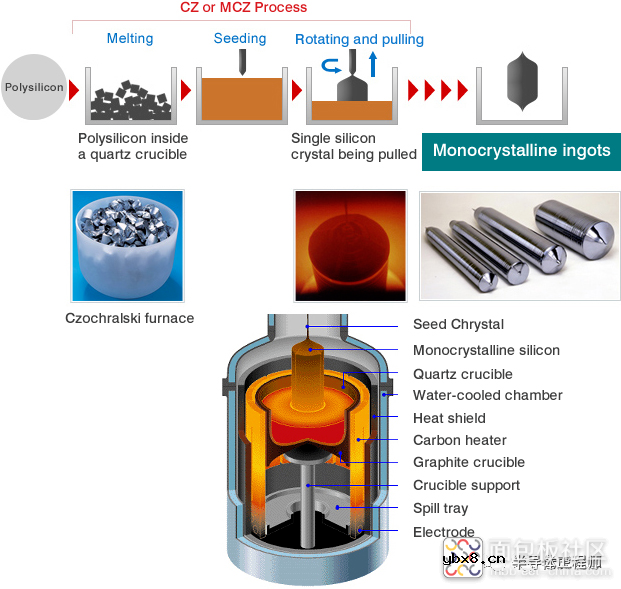 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
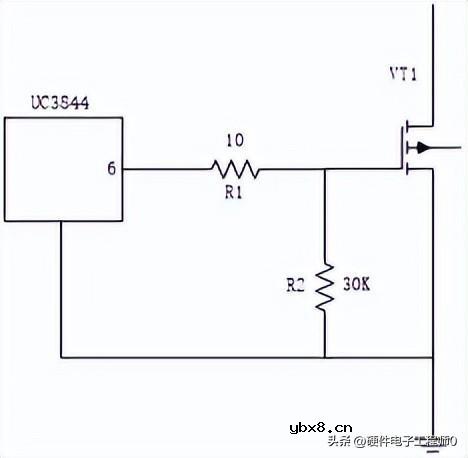 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09
汽车芯片业应汲取的教训
时间:2026-03-09
压敏电阻型号的含义
时间:2026-03-05
半导体行业之ICT技术简介
时间:2026-03-09