仿生机械传感器对医疗保健、假肢、人机接口和机器人技术等各个领域具有深远的影响。作为最重要的参数之一,机械传感器的灵敏度本质上取决于其对机械力的检测分辨率。
据麦姆斯咨询报道,近日,大连理工大学研究人员组成的团队在Microsystems & Nanoengineering期刊上发表了题为“A nanonewton-scale biomimetic mechanosensor”的论文,开发了一种基于纳米裂纹的“电子须”(NCBEW)机械传感器,其检测分辨率达到72.2纳牛顿(nN)。该传感器实现了对细微机械刺激(如微小物体和气流)的感知,以及对低至30 nm高度表面形态的识别,这是迄今为止报道的仿生机械传感器所取得的最高分辨率。
更重要的是,研究人员探索了在可穿戴设备中使用这种机械传感器来感知相对于身体的重力场方向,这是此类传感器以前从未实现过的功能。本研究开发的可穿戴智能系统能够感知身体的姿势和运动状态,可用于远程监测老年人的跌倒情况。总之,所提出的NCBEW机械传感器将当前仿生机械传感器的力检测分辨率从微牛顿级扩展到了纳牛顿级。它不仅赋予设备对周围环境更灵敏的感知能力,而且为个人健康保健和重力感知人工前庭等潜在应用提供了机会。
NCBEW机械传感器模仿了动物的胡须感知系统。猫的胡须以及底层传感机制如图1a所示。具体来说,胡须纤维生长在毛囊中,其根部被神经细胞包围。当机械刺激(如外力)作用于纤维上时,纤维的变形会由于其弯曲而推动或拉动神经元细胞。然后,神经元细胞将机械刺激转化为电信号,并最终将电信号传送到大脑。如图1b所示,研究人员使用聚二甲基硅氧烷(PDMS)悬臂梁作为柔性传感纤维,模仿须状纤维承受外部载荷并将其转化为内部应变,并在悬臂梁根部放置一个U形纳米裂纹应变传感器作为神经元细胞,从而感知传感纤维的变形并产生电信号。

NCBEW机械传感器的制造流程如图1c所示。首先,将一层金(Au)溅射到PDMS薄片上。然后,使用标准光刻法对Au进行图案化。第三步,再次对Au上的光刻胶进行图案化,以确定纳米裂纹的位置。第四步,样品被弯曲而产生裂纹。第五步,去除样品的光刻胶,并使用刀模将PDMS薄片定义为传感光纤。为实现倾角传感,还可选择在传感光纤的两侧粘接两片PDMS。图1d显示了NCBEW机械传感器的照片。图1e显示了在Au层中精确制造的纳米裂纹,并且可以观察到重叠的裂纹边缘。
图2a显示了基于纳米裂纹的应变传感单元的示意图。基于Au/PDMS纳米裂纹的应变传感单元的工作原理包括重叠效应和隧道效应。因此,当对传感纤维施加机械刺激,迫使纤维向外弯曲时,电极就会被拉伸,从而使纳米裂纹张开。与此同时Au层的电阻急剧增加,从而指示出所施加的机械刺激的值(图2b)。相反,当传感光纤被迫向内弯曲时,裂纹边缘重叠,Au层的电阻降低。此外,结合之前有关纳米裂纹传感器的报道,研究人员建立了机电模型,以显示所提出的NCBEW机械传感器的输出与所施加的力之间的关系。

研究人员表征了NCBEW机械传感器的传感性能,如图3所示。NCBEW机械传感器表现出超高的灵敏度。

在实际应用中,机械传感器灵敏度的提高可以实现更好的性能和传感能力。为了展示NCBEW机械传感器的优势,研究人员利用其传感器进行了触觉识别和气流监测,结果如图4和图5所示。


在自然界中,人类和一些动物使用前庭系统来感知地球的重力,这对身体来说是一种无处不在的环境刺激。前庭系统通过耳石和立体纤毛感知重力(图6a和图6b)。研究人员证实了NCBEW机械传感器具有感知人体相对于重力场方向的倾角的功能(图6),这是目前的仿生机械传感器尚未实现的。

为了实现类似于人类前庭系统的功能,研究人员开发了一种可穿戴设备,将NCBEW机械传感器、后处理电路和蓝牙单元集成到发带上(图7a)。该系统实现了对身体姿势和运动状态的感知,因此可以作为人工前庭系统,并可用于远程监测老年人的跌倒情况。

综上所述,通过将基于纳米裂纹的应变传感器与柔性传感纤维集成形成新型“电子须”,研究人员开发了一种仿生机械传感器。所提出的NCBEW机械传感器实现了低至72.2 nN的力的检测分辨率、对头发气流等微小物体的感知,以及低至30 nm高度的表面形态识别,这是迄今为止报道的关于仿生机械传感器的最高分辨率。除了在检测分辨率方面的改进之外,研究人员还利用NCBEW器件来感知物体相对于地球垂直方向的倾角,这是此类传感器以前从未实现过的。因此,提出的NCBEW机械传感器在灵敏度方面取得了重大进步,并为远程医疗保健的应用提供了巨大的潜力。
审核编辑:刘清
 电感器设计流程和见解
电感器设计流程和见解
时间:2026-05-01
 什么是触发器?触发器的作用是什么?
什么是触发器?触发器的作用是什么?
时间:2026-05-01
什么是电源?电源是如何进行分类的?
时间:2026-05-01
电驱动NVH的特点和结构
时间:2026-05-01
什么是霍尔传感器?
时间:2026-05-01
电负性的计算方法
时间:2026-04-30
电导的定义_电导的单位_电导怎么算
时间:2026-04-30
什么是计数器_计数器的作用
时间:2026-04-30
什么是欧姆定律_欧姆定律公式
时间:2026-04-30
RAID是什么?RAID有哪些?
时间:2026-04-30
 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
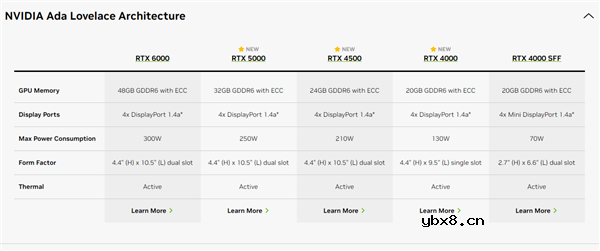 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
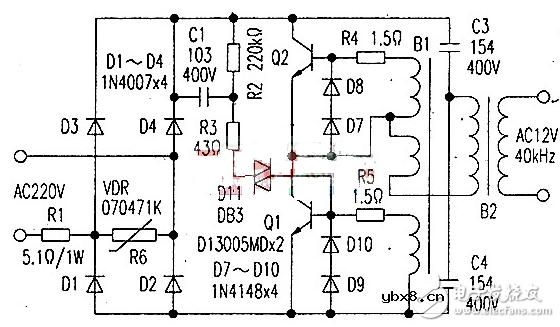 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
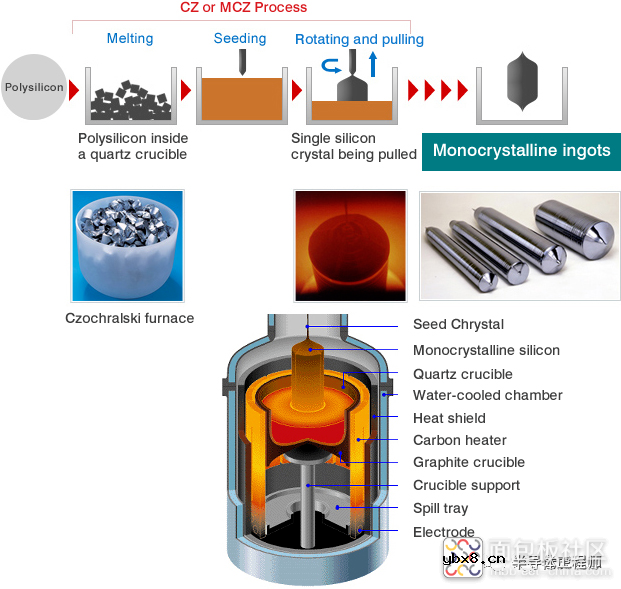 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
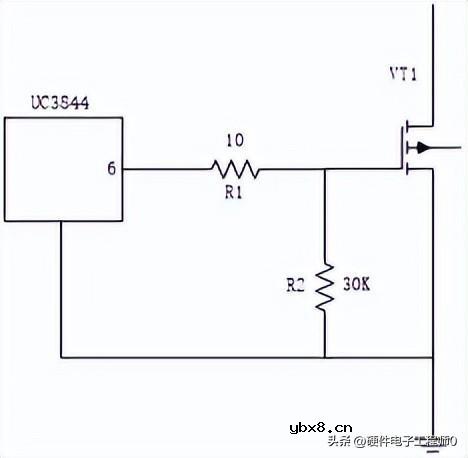 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09
汽车芯片业应汲取的教训
时间:2026-03-09
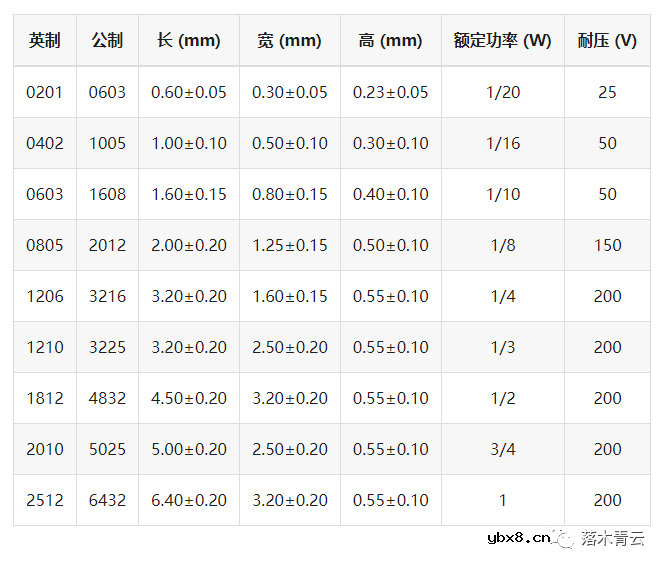
压敏电阻型号的含义
时间:2026-03-05
半导体行业之ICT技术简介
时间:2026-03-09