01
技术指标解读
以 ICM40607 规格书中的 SPECIFICATIONS 为例说明。

02
重要误差介绍


噪声(noise: angle random walk/velocity random walk)
可以简单理解为 高斯白噪声,(白噪声是一种频率远高于传感器采样频率的高频误差,是信号的随机波动)
白噪声给陀螺仪带来的误差称为Angular random walk(ARW), 误差单位:rad/s/sqrt(Hz), deg/s/sqrt(Hz), deg/sqrt(hr)。
假设某器件的ARW为0.12 deg/sqrt(hr),可简单理解为在1小时内,由ARW造成正负0.12°的误差。
给加速度计带来的误差称为Velocity random walk(VRW),误差单位:m/s2/sqrt(Hz), m/s/sqrt(h), mGal/sqrt(Hz)。
比例因子(scale factor)
刻度误差, 输出被测量的信号/输入物理量
交轴
每个轴的输出受到其它两个轴的输入的影响
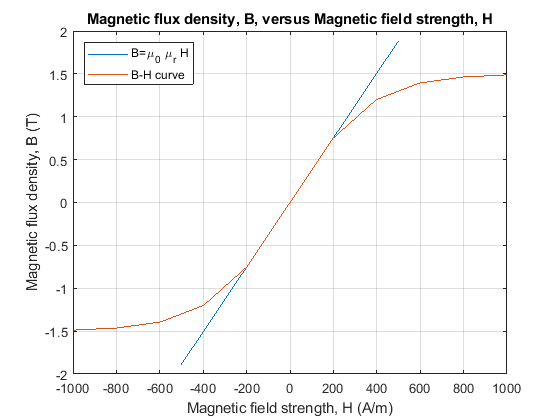
非线性
由比例因子非线性导致的输出误差
零偏稳定性(准确讲应该是零偏不稳定性)
在固定条件(通常为恒温)下,在指定的时间段内传感器的零偏发生的变化。
可以把它理解为零偏随时间的缓慢变化,假设在刚开始时零偏大小是某个值,那么过一段时间之后,零偏便发生了变化,具体变化成了多少,无法预估,所以就要给他一个概率区间,来描述它有多大的可能性落在这个区间内,时间越长,区间越大。
03
深入理解白噪声
3.1 角度随机游走
对角速率做积分,必然也对噪声也做了积分。白噪声的积分并不是白噪声,而是一个 马尔可夫过程,即当前时刻的误差是在上一时刻误差的基础上累加一个随机白噪声得到的。
角度误差中所含的马尔可夫性质的误差,称为角度随机游走。
注意:既然是噪声的指标,那么就是统计学指标,是随机变量,这种噪声既不能出厂前校准也不能被补偿。
3.2 角速率随机游走
对角加速度噪声积分
角速率误差中所含的马尔可夫性质的误差,称为角速率随机游走。
3.3 马尔可夫
马尔可夫推导引出功率谱密度的概念。
下面直接得出马尔可夫性质:
马尔可夫性质的误差是由宽带角加速率白噪声累积的结果
功率谱密度(PSD)的单位

陀螺白噪声与角度随机游走的关系

审核编辑:刘清
 电感器设计流程和见解
电感器设计流程和见解
时间:2026-05-01
 什么是触发器?触发器的作用是什么?
什么是触发器?触发器的作用是什么?
时间:2026-05-01
什么是电源?电源是如何进行分类的?
时间:2026-05-01
电驱动NVH的特点和结构
时间:2026-05-01
什么是霍尔传感器?
时间:2026-05-01
电负性的计算方法
时间:2026-04-30
电导的定义_电导的单位_电导怎么算
时间:2026-04-30
什么是计数器_计数器的作用
时间:2026-04-30
什么是欧姆定律_欧姆定律公式
时间:2026-04-30
RAID是什么?RAID有哪些?
时间:2026-04-30
 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
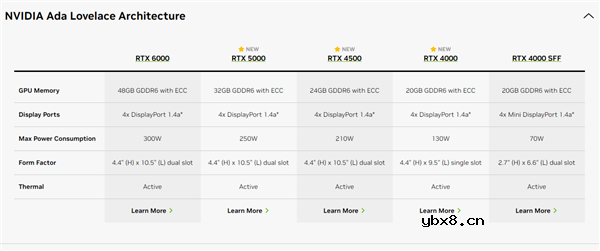 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
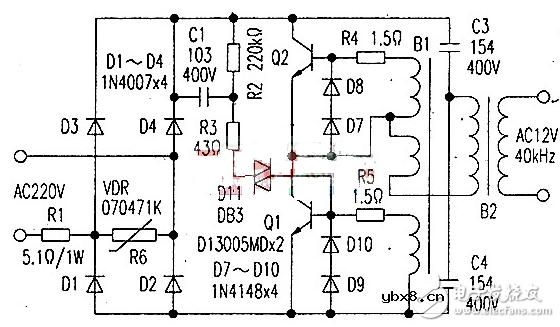 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
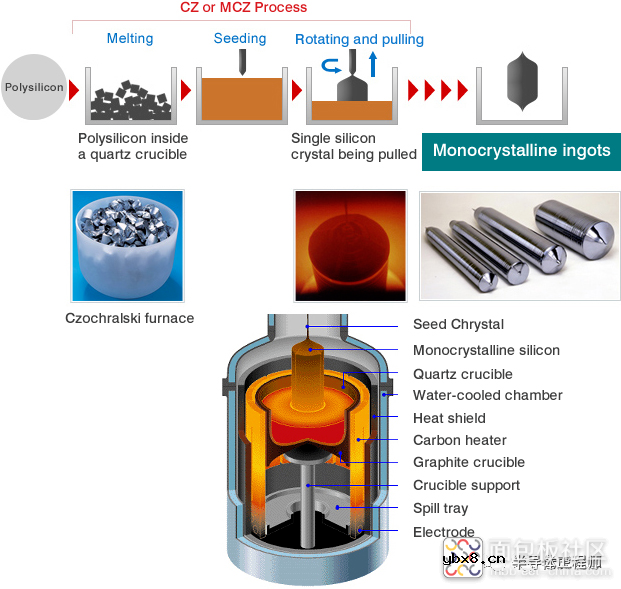 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
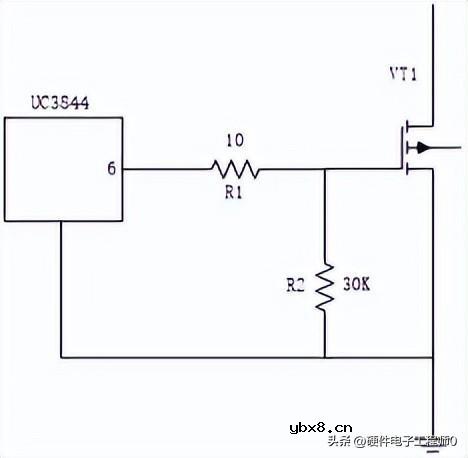 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09
汽车芯片业应汲取的教训
时间:2026-03-09
压敏电阻型号的含义
时间:2026-03-05
半导体行业之ICT技术简介
时间:2026-03-09