/* Linear Clock driver Written by Sandy Noble ([email protected]) This version 8th Jan 2011 This uses the AFMotor library from Adafruit, because I used an Adafruit Motorshield, and I think Adafruit are the bomb. Make sure you use a version of the libraries from after 7th Jan 2011, because there's a little fix in them that is important to this code. This should be fairly simple self-explanatory code. */ #include #include// These set up the motors. The values here depend on how they've been wired up. AF_Stepper minuteHand(20, 1); // minutes int const minutesIncrement = BACKWARD; int const minutesDecrement = FORWARD; AF_Stepper hourHand(20, 2); // hours int const hoursIncrement = FORWARD; int const hoursDecrement = BACKWARD; int const stepType = DOUBLE; int const motorRPM = 150; int second=0, minute=0, hour=0; // declare time variables // Minutes setup int startMinutePos = 0; // current minute position. This gets updated all the time. float currentMinutePos = startMinutePos; // the current position of the indicators. This only gets updated when the hands move int displayMinutePos = startMinutePos; // Hours setup int startHourPos = 0; float currentHourPos = startHourPos; int displayHourPos = startHourPos; // These are the actual time, in seconds minutes and hours. // doTick() writes these values, and renderTime() reads them. int currentSeconds = 0; int currentMinutes = 50; int currentHours = 11; int const millisPerSecond = 200; int const stepsPerClock = 592; float const stepsPerMinute = stepsPerClock/60.0; float const stepsPerHourMinute = stepsPerClock/720.0; float const stepsPerHour = stepsPerClock/12.0; void setup() { Serial.begin(9600); // set up Serial library at 9600 bps Serial.println("LINEAR CLOCK!"); hourHand.setSpeed(motorRPM); // 10 rpm minuteHand.setSpeed(motorRPM); // 10 rpm } void loop() { static unsigned long lastTick = 0; // set up a local variable to hold the last time we moved forward one second // (static variables are initialized once and keep their values between function calls) // move forward one second every 1000 milliseconds unsigned long time = millis(); unsigned long sinceLastTick = time - lastTick; if (sinceLastTick >=millisPerSecond) { unsigned int secondsMissed = sinceLastTick / millisPerSecond; lastTick = millis(); for (int i = 0; i < secondsMissed; i++) { doTick(); } } renderTime(); } void doTick() { currentSeconds++; if (currentSeconds > 59) { currentSeconds = 0; currentMinutes++; if (currentMinutes > 59) { currentMinutes = 0; currentHours++; if (currentHours > 11) { currentHours = 0; } } } Serial.print(millis()); Serial.print(" - tick!"); Serial.print(currentHours); Serial.print(":"); Serial.print(currentMinutes); Serial.print(":"); Serial.println(currentSeconds); } void renderTime() { setTime(currentHours, currentMinutes); } void setTime(int hour, int minute) { setHour(hour, minute); setMinute(minute); } void setHour(int hour, int minute) { // work out the new position and set it globally eg time 4:25. // first hours // eg 0.2055 * 4 * 60 = 49.333 float justHours = stepsPerHourMinute * hour * 60; // eg 0.2055 * 25 = 5.13888 float justMinutes = stepsPerHourMinute * minute; // stick em together: position is 54.472 (4:25) currentHourPos = justHours + justMinutes; // round to integer // eg 54 int newPos = currentHourPos; // save the previous actual position so we can check if the hands need moving // eg 52 int lastPos = displayHourPos; // now see if the hand position needs to change // eg 54 - 52 = 2 int stepsToChange = newPos - lastPos; if (stepsToChange != 0) { Serial.print("sethour:"); Serial.println(hour); // update the global variable displayHourPos = newPos; changeHours(stepsToChange); } } void changeHours(int steps) { Serial.print("Incrementing hours position:"); Serial.println(steps); // make it positive int absSteps = abs(steps); if (steps < 0) { // if it's negative, then DECREMENT if (absSteps >= 1) { // only step if it's a full step hourHand.step(absSteps, hoursDecrement, stepType); } } else if (steps > 0) { // if it's positive then INCREMENT if (absSteps >= 1) { // only step if it's a full step hourHand.step(absSteps, hoursIncrement, stepType); } } Serial.print("Actual current hour position:"); Serial.println(displayHourPos); hourHand.release(); } void setMinute(int minute) { // work out the new position and set it globally // eg 2.467 * 25 = 61.675 currentMinutePos = stepsPerMinute * minute; // round to integer // eg 61 int newPos = currentMinutePos; // save the previous actual position so we can check if the hands need moving // eg 59 int lastPos = displayMinutePos; // now see if the hand position needs to change // eg 61 - 59 = 2 int stepsToChange = newPos - lastPos; if (stepsToChange != 0) { Serial.print("setmin:"); Serial.println(minute); // update the global variable displayMinutePos = newPos; changeMinutes(stepsToChange); } } void changeMinutes(int steps) { Serial.print("Incrementing minutes position:"); Serial.println(steps); // make it positive int absSteps = abs(steps); if (steps < 0) { // if it's negative, then DECREMENT if (absSteps >= 1) { // only step if it's a full step minuteHand.step(absSteps, minutesDecrement, stepType); } } else if (steps > 0) { // if it's positive then INCREMENT if (absSteps >= 1) { // only step if it's a full step minuteHand.step(absSteps, minutesIncrement, stepType); } } Serial.print("Actual current minute position:"); Serial.println(displayMinutePos); minuteHand.release(); }
 什么是PCA?何时应该使用PCA?
什么是PCA?何时应该使用PCA?
时间:2026-04-28
仪表放大器放大倍数分析
时间:2026-04-28
射频微波设计入门
时间:2026-04-28
 变压器结构
变压器结构
时间:2026-04-28
8种进行简单线性回归的方法分析与讨论
时间:2026-04-28
什么是RS485通信接口
时间:2026-04-28
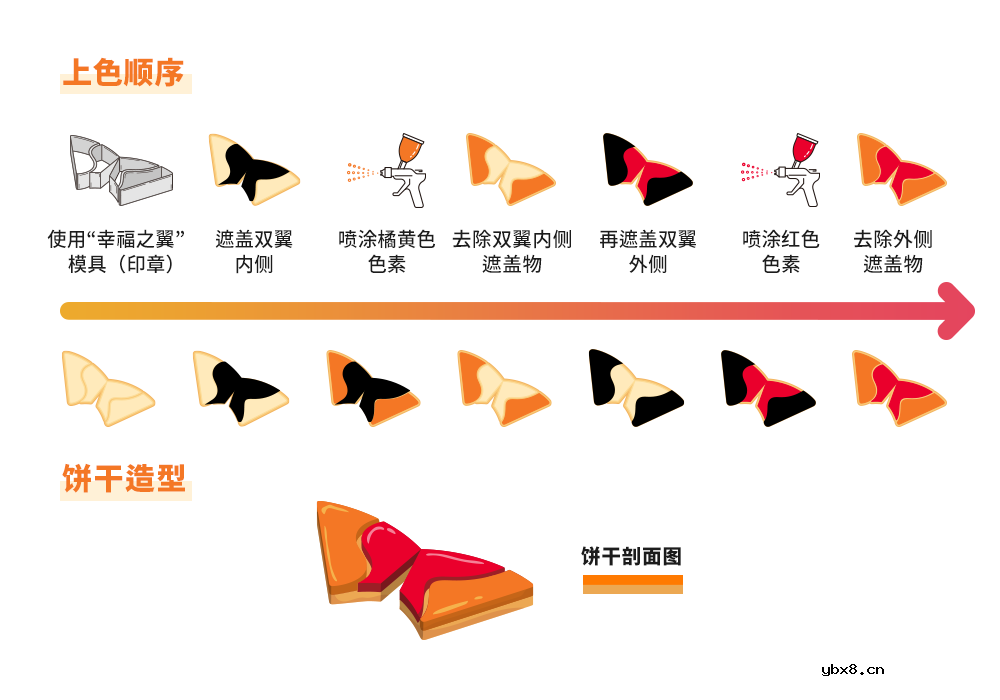
 简单的上色装置
简单的上色装置
时间:2026-04-26
 液晶屏对比度温度补偿
液晶屏对比度温度补偿
时间:2026-04-26
 双输入视频多路复用的电缆驱动器
双输入视频多路复用的电缆驱动器
时间:2026-04-26
 带有75Ω负载的抗阻匹配线路驱动器
带有75Ω负载的抗阻匹配线路驱动器
时间:2026-04-26
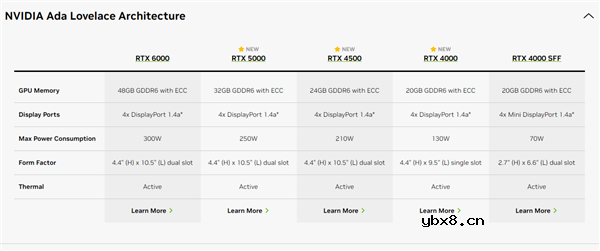 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
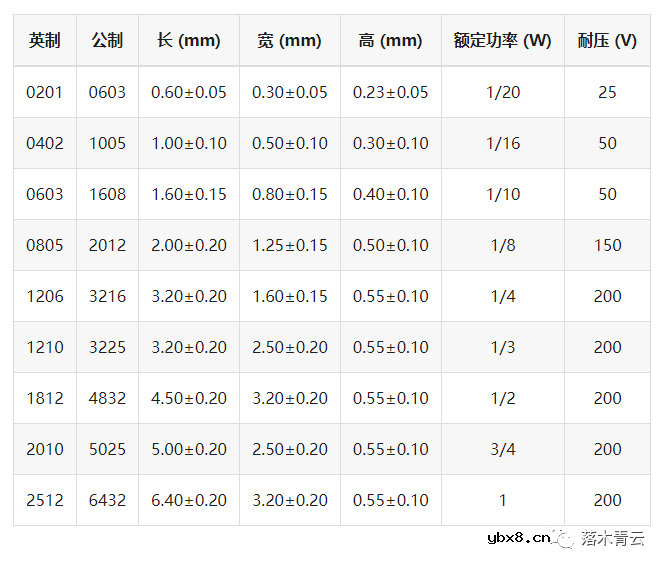 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
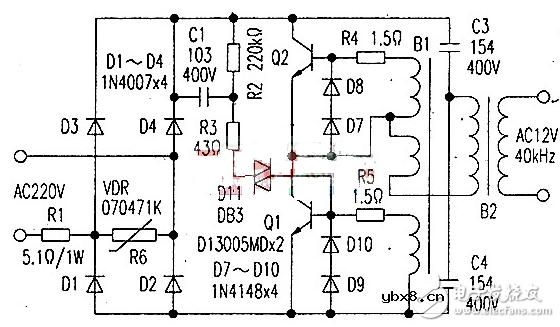 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
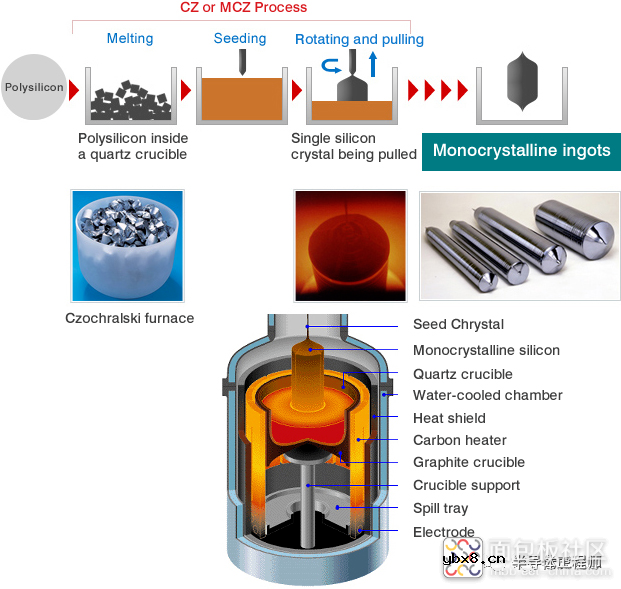 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
汽车芯片业应汲取的教训
时间:2026-03-09
半导体行业之ICT技术简介
时间:2026-03-09
压敏电阻有正负极吗
时间:2026-03-05
实用模拟电路小常识浅析
时间:2026-03-09