|
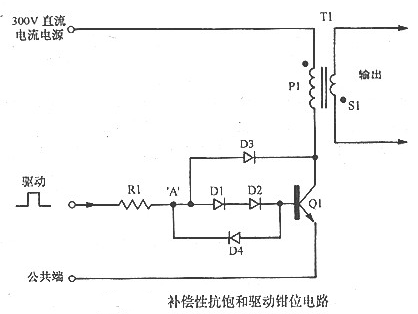
在高压双极型开关晶体管中,“下降时间”(关断沿的速度或者dv/dt)主要由基极驱动关断电流特性曲线的形状来决定,从基极关断驱动申请到真正关断沿之间的延时是存储延时时间,它取决于关断之前的基区少数裁流子浓度。 通过使少数载流子浓度最低来使存储时间减到最少,具体可解释为,在晶体管关断之前,保证其基极电流刚好满足驱动,而保持晶体管处在准饱和的状态。 经常用来实现使少数载流子浓度最低的一种方法叫作二极管补偿性钳位电路。因为这种方法的优点是对(cmos)驱动进行带负反馈的动态钳位,所以能够对各种器件的增益以及饱和电压不可避免的变化有补偿作用,同时它也会对由于温度与负载变化而引起的开关晶体管参数的变化做出反应。 二极管补偿性钳位电路 图中是一个典型的补偿性钳位电路,它的工作原理如下:
二极管Dl、D2与基极驱动元件串联连到Ql的基极,A点驱动电压包括二极管DI、D2上的压降和Ql基射极电压Vh。在oi导通时A点驱动电压近似达到2V。 当Q1导通时,其集电极电压开始下降,当这个集电极电压降到约1. 3V时,D3开始导通,使基极驱动电流分流到Q1的集电极。这个钳位行为受负反馈控制,自调整将一直持续到Q1的集电极电压有效地钳位在1.3V上为止。 这样的话,晶体管始终保持在准饱和导通状态,以最少的基极驱动电流维持这种状态。在导通时这个准饱和状态维持基区的最少的少数载流子数,从而在关断期获得最小的延时时间。在关断期,D4给Ql基极的反向关断电流提供了一条通路。 在基极电路中二极管数目Dl、D2、…、Dn的选择应该和晶体管的饱和电压匹配。这个钳位电压应该高于在工作电流下的晶体管正常的饱和集电极电压,确保在准饱和导通状态下真正维持晶体管工作。 这项技术有一个缺点是,在导通期间Ql的集电极电压略高于深饱和时的集电极电压,增加了晶体管的功耗。 责任编辑:gt (责任编辑:admin) |