相关热词:#卡尔曼滤波
 详解卡尔曼滤波原理
详解卡尔曼滤波原理
时间:2026-04-23
什么是IMU(惯性传感器)
时间:2026-04-23
编码器是什么?编码器有哪些分类?
时间:2026-04-23
 电容器颜色代码
电容器颜色代码
时间:2026-04-23
简述ESD的原理和测试
时间:2026-04-23
介电常数是什么意思
时间:2026-04-23
影响介电常数的因素有哪些?
时间:2026-04-22
关于电流互感器基础知识介绍
时间:2026-04-22
开关电源的工作原理及特性
时间:2026-04-22
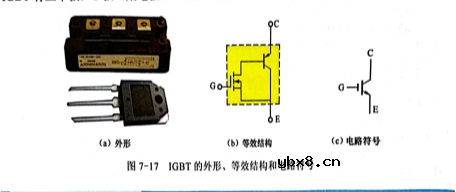 绝缘栅双极型晶体管(IGBT)外形、等效结构与...
绝缘栅双极型晶体管(IGBT)外形、等效结构与...
时间:2026-04-22
什么是追踪缓存/转接卡?
时间:2026-03-06
什么是GPS旅行提示器/屏幕尺寸
时间:2026-03-07
GPS的WAAS跟踪性能
时间:2026-03-07
GPS接收机的分类
时间:2026-03-07
GPS设备的动态性能
时间:2026-03-07
坐标基准
时间:2026-03-07
 EMC和ESD防护技术
EMC和ESD防护技术
时间:2026-03-05
GPS设备的地图功能
时间:2026-03-07
GPS的接口有哪些类型?
时间:2026-03-07
什么是EPIC
时间:2026-03-06