在人形机器人的精密世界中,每一个微小的部件都承担着重要的角色。控制器,作为机器人的“大脑”,其稳定性和可靠性对于整个系统的性能至关重要。控制器不仅需要处理复杂的算法和信号,还要精确地指挥机器人的运动和操作,包括但不限于路径规划、速度控制、精确定位等。而控制器中的微小元器件,是保障人形机器人控制器稳定性和可靠性的关键组件。
高分子固态铝电解电容器解决方案
01
超低ESR
人形机器人控制器在运行过程中会面临高速、复杂动作的电流波动,尤其是在执行高频率、高负载的运动时,控制器需要及时响应这些电流波动,确保电源供应的稳定性。传统电容在面对这种波动时,可能因高ESR而导致能量损耗,影响系统性能。高分子固态铝电解电容器的超低ESR特性能够显著减少能量损耗,使电容快速稳定地响应电流变化,提供稳定的电源供应,确保机器人控制系统始终维持最佳性能。
02 高容许纹波电流
人形机器人在执行各种动作时,尤其是在快速启动、停止或者转向时,控制器会经历瞬时高电流波动。传统电容可能因为无法承受过大的电流而发生损坏,导致系统故障。高分子固态铝电解电容器具备高容许波电流的优势,帮助机器人控制器在复杂动态环境下保持稳定的电源供应,可以在电流波动较大的情况下,快速响应并稳定供应电力,避免电容过载导致的损坏。
03 小体积大容量
机器人控制器通常需要在有限的空间内装载高容量电容,以提供足够的电能支持。高分子固态铝电解电容器以小体积、大容量为特点极大地优化了机器人控制器的设计空间,为紧凑型机器人提供了足够的电能支持,同时避免了体积和重量上的负担。
04 选型推荐

液态贴片型铝电解电容器解决方案
01 小体积大容量
人形机器人对空间和重量的要求日益严格。液态贴片型铝电解电容器的小型化特点,有效减少了电源模块的尺寸和重量。优化机器人整体设计的同时,还减轻了机器人本身的负担。在快速启动或负载变化时,液态贴片型铝电解电容器的高容量化特点,能够提供充足的电流储备,避免因电源不足导致的控制系统响应延迟或失效,从而提高机器人的控制精度和运行稳定性。
02 低阻抗
液态贴片型铝电解电容器能够有效减少电源电路中的能量损耗,保证电能高效传输。这优化了电源系统的响应速度,增强了控制器的实时性和稳定性,尤其在负载波动较大的情况下,能更好地应对复杂的控制需求。
03 耐大纹波电流
人形机器人在高速运动和精确控制时,控制器的电源常常会遇到大电流纹波。液态贴片型铝电解电容器能够承受大幅度的电流波动,有效避免由于电流波动带来的不稳定性,确保控制器电源在高负载下仍能稳定运行,从而优化机器人系统的稳定性和可靠性。
04 超长寿命
液态贴片型铝电解电容器以其超长寿命,为机器人控制器提供了持久的可靠性。在105℃高温环境下,寿命可达10000小时,这意味着在各种严苛的工作条件下,电容器都能保持稳定的表现,减少了维护成本和更换频率。

总 结
在人形机器人控制器的精密系统中,电容器的选择直接关系到机器人性能的稳定性和可靠性。永铭液态贴片型铝电解电容器&高分子固态铝电解电容器以其独特的优势,成为解决机器人控制系统面临挑战的关键组件。无论是在空间紧凑的设计中提供高容量电力,还是在负载波动较大的情况下确保电源的稳定,亦或是在高频复杂动作中保证快速响应,这些电容器都能满足机器人控制器对电源稳定性、可靠性和高效能量传输的严格要求。
 VRRP是什么?VRRP的作用和工作原理
VRRP是什么?VRRP的作用和工作原理
时间:2026-06-05
 32768晶振封装尺寸详解
32768晶振封装尺寸详解
时间:2026-06-05
静态路由是什么?静态路由如何配置?
时间:2026-06-05
一文详解光耦的作用与分类、使用技巧
时间:2026-06-05
热插拔是什么?热插拔有哪些特点?
时间:2026-06-05
深度解析电磁炉的工作原理与常见故障
时间:2026-06-04
介绍电流互感器的6种常见接线方法
时间:2026-06-04
VGA接口的详细解读和应用
时间:2026-06-04
物联网新兴薄膜技术
时间:2026-06-04
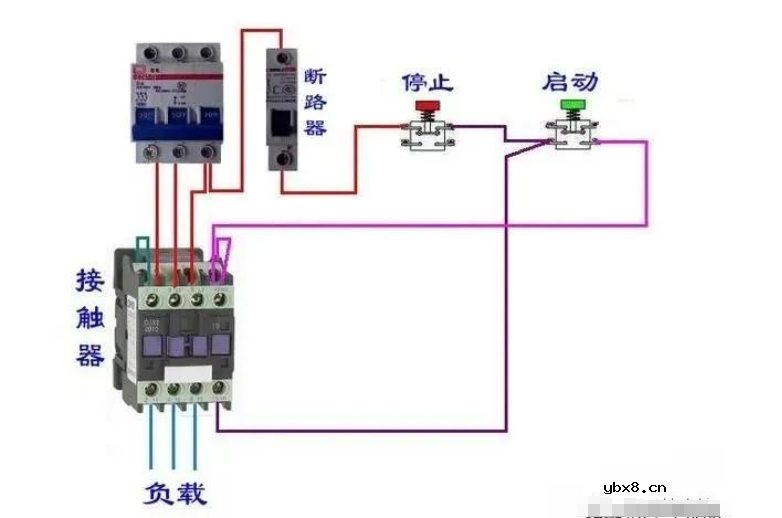 接触器的规格、原理结构、应用接线
接触器的规格、原理结构、应用接线
时间:2026-06-04
电阻的单位
时间:2026-03-05
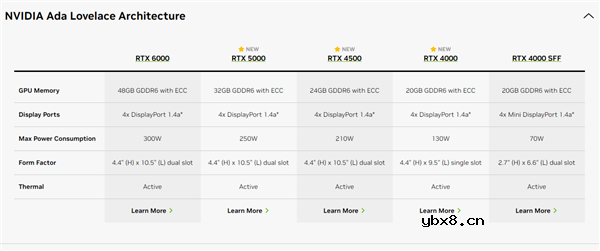 NVIDIA CPU+GPU超级芯片大升级!
NVIDIA CPU+GPU超级芯片大升级!
时间:2026-03-09
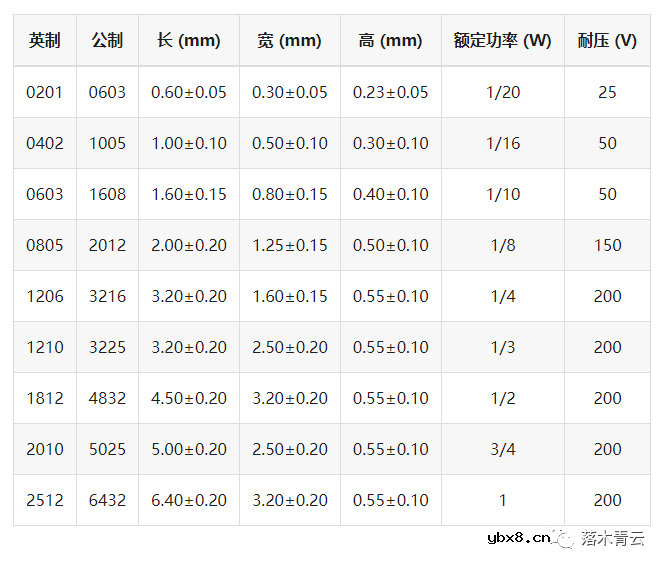
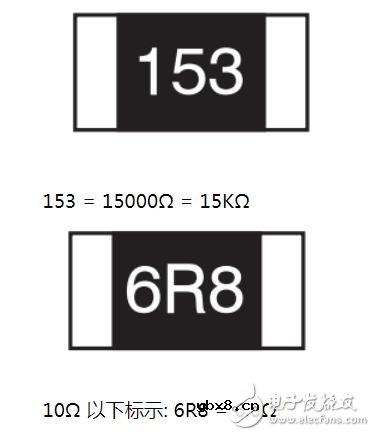 贴片电阻怎么看阻值
贴片电阻怎么看阻值
时间:2026-03-05
 电阻的原理和作用 电阻色环识别图 电路中电...
电阻的原理和作用 电阻色环识别图 电路中电...
时间:2026-03-09
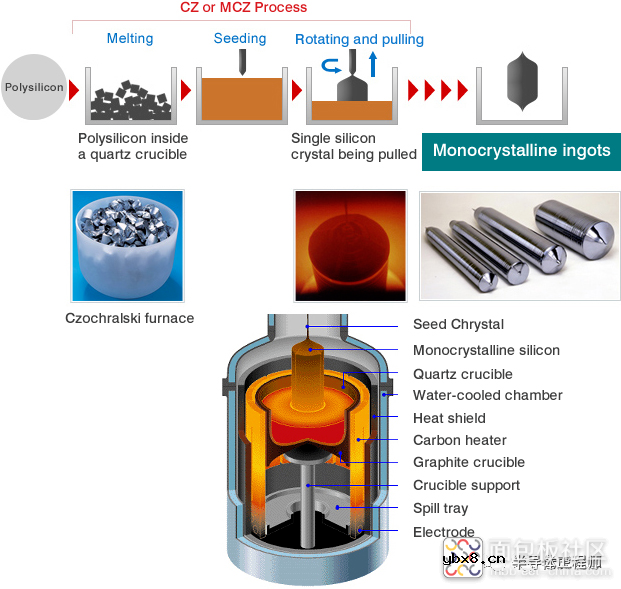 什么是硅片或者晶圆?一文了解半导体硅晶圆
什么是硅片或者晶圆?一文了解半导体硅晶圆
时间:2026-03-09
什么是室温超导?半导体时代将走向结束?芯...
时间:2026-03-09
 半导体光刻工艺 光刻—半导体电路的绘制
半导体光刻工艺 光刻—半导体电路的绘制
时间:2026-03-09
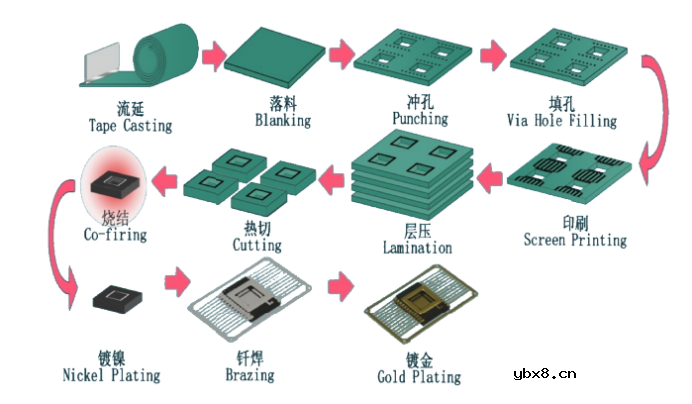 HTCC:半导体封装的理想方式
HTCC:半导体封装的理想方式
时间:2026-03-06
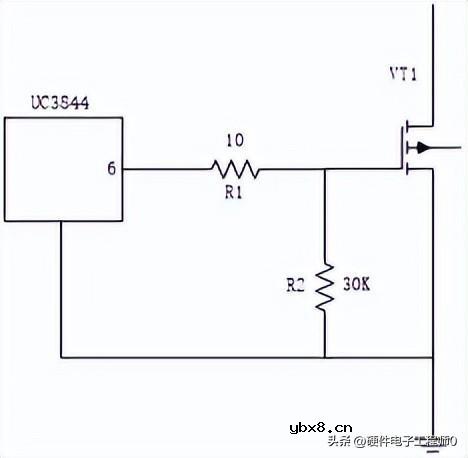 一文详解MOS管驱动电路拓扑的设计
一文详解MOS管驱动电路拓扑的设计
时间:2026-03-09
 石英灯电子变压器电路原理
石英灯电子变压器电路原理
时间:2026-03-06