|
前面所述的OP放大器是放大器在机器人学领域应用的一个方面,下面介绍控制器具体的实现方法。在具体的电路中,OP放大器用于信息处理,即把电压转换为可供利用的信息。从高效率利用能源的角度看,应该控制流过电路的电流为最小。在计算机进行信息处理的时候,也面临同样的问题。 不过,将OP放大器电路或计算机处理决定的控制量输人伺服器时,需要加进一个电路,它具有一定的输出阻抗,以便产生足够的电流,给驱动器施加足够的电压。扮演这个角色的就是功率放大器。 1.功率OP放大器 如前所述,理想OP放大器的输出阻抗是0。这就意味着无论输出端要求多大的电流它都能办到。可是,OP放大器的输出端在大多数情况下都与其他OP放大器的输人端连接着,设计时基本上可以认为OP放大器是与高输人阻抗连接的。因此,它的实际输出阻抗并不很大。相应地,考虑到与低阻抗负载连接的用途,OP放大器也可以按照大的输出电流来设计,一般称之为功率放大器。 功率放大器与一般的OP放大器的不同点仅仅在于输出大电流的那一部分,除此之外,两者几乎没有区别。处理大电流时必须注意的最大问题是OP放大器内部允许的损失和它的放热措施。工作状态不同,OP放大器内部所消耗的功率变化也极大,在能量效率很差的区域功率损耗相当多,所以需要进行合理的散热设计。 实际情况是,市场上销售的功率放大器产品大多数的最大电流为1A左右,当然也有3-10A左右输出电流的放大器。放大器的外形也应该适应散热的要求,例如,配备散热风扇,安装散热板片等。 功率OP放大器充当功率放大器的优点是放大器本身兼有控制器,所以设计和安装十分简单。因此,它很适合用于各种实验。不过,从能量效率的观点看还有点问题,即它必须备用两个电源。特别是自主移动式机器人,对搭载电源有严格的限制,能量效率要求比较高,因此很难说功率放大器是比较适合的选择。 2.线性功率放大器 由电流放大晶体管(功率晶体管)组成的功率放大器对性能规格的适应范围较宽,在市场上有大量出售,很便于组成能满足各种要求的功率放大器。其中典型的例子就是线性功率放大器,其基本原理如图3.35所示。 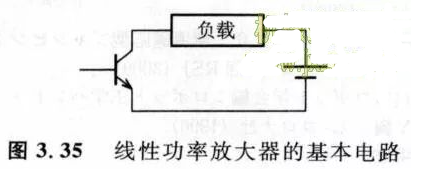 这个电路的基本思想就是用晶体管和负载将电源电压进行分压,以此来调整加在负载上的电压。如前所述,晶体管本身的参数h在制造时分散性很强,受温度影响大,不采取措施难以得到稳定的动作。还有一个问题是,图3.35中流过负载的电流仅沿一定方向流动。在机器人学领域,功率放大器驱动的对象多数是电机,它们需要双向驱动,电流单向流动显然不合适。 基于上面的实际问题,将线性功率放大器电路改成如图3.36所示。 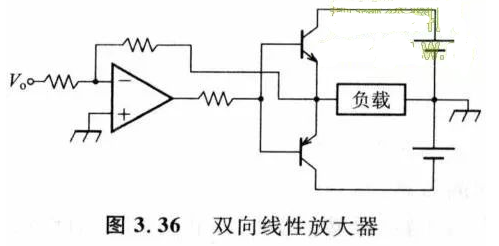 在图3. 36的电路中,用OP放大器将反馈返回到施于负载的电压上,这样有利于消除因晶体管参数变动而产生的影响。通过使用复合晶体管对与两个电源,负载电流可以按照输人信号的符号方向流动。 如前所述,电路利用负载和晶体管来进行分压,起到了调整负载电压的作用。晶体管所消耗的能量相当于施加在晶体管上的电压与负载电流的乘积。因此,需要充分考虑输出端晶体管的选择以及它的散热对策。 组成这个电路的元器件比较多。实际上,尤其是在电机驱动器这种功率放大器的典型应用场合,在市场上可以购得所需元器件全部IC化的电机驱动器商品。电机容量较小时,则选用专用IC会更方便一些。 3.PWM放大器 基于PWM (Pulse Width Modulation,脉宽调制)放大器驱动方式的H桥式功率放大器经常被用于机器人数十瓦级的电机驱动电路。 在前述线性功率放大器中曾经谈到,位于输出极的晶体管产生功率消耗。通常,该部分功率通过散热片向外排出热量,因此它存在能量损失相当大的缺点。但是,在这种方式中,如果晶体管完全是on或完全是off的场合并不造成能量损失。之所以如此的原因是晶体管在on的状态时给晶体管施加电压,以及在off的状态时流过晶体管的电流均为0。 基于这个原理,给晶体管反复交互地施加on,off的脉冲信号(PWM信号),就能够降低能量损失,这种方式称为PWM驱动方式。不过,虽然此时on,off不断反复,为了不引起电机振动,要求信号的脉冲周期(脉冲信号的频率)设定的要比电机电气时间常数(一般为数毫秒的量级)小。至于对转速的控制,则是根据on,off时间的比例,即占空比来实现。 图3. 37给出了电机驱动器经常使用的PWM驱动方式的基本电路。在这个电路中,给电机配置了四个呈H状布置的晶体管,它能实现单电源供电的电机正反转驱动,这种方式叫做H桥方式。在此基础上,利用把下一级的两个晶体管同时on,造成电机端子之间的短路,可以实现制动。晶体管的四个状态与正转、反转、制动、停止等四个动作的对应组合如表3.8所示。 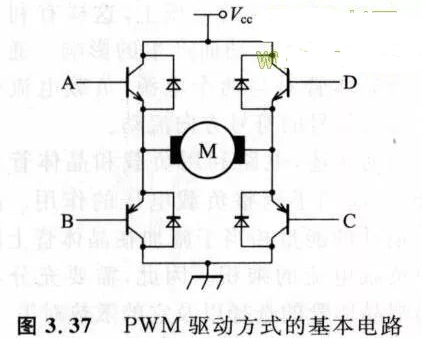 在该电路中,与晶体管并联的二极管叫做续流二极管,由于它的作用,在脉冲输人的off期间,储存在电机中的能量得以维持电机的电流,达到了提高效率的效果。 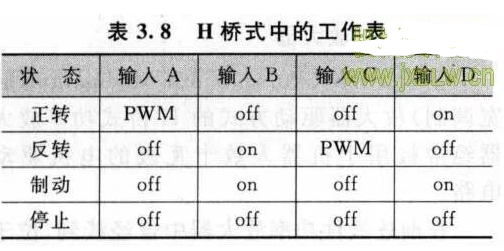 如果向电机下达的指令为模拟电压,就需要与模拟电压值成正比地生成PWM的占空比信号。此时最常用的方法是预先准备某个周期的三角波,把它与模拟信号同时输人运算比较器。不过,如果是通过计算机输出指令值,因为市场已经有产生总线界面PWM波的现成的IC出售,所以可以直接购买来利用。在单片的MPU中,大多都嵌人了产生PWM波的功能,使用起来非常方便。 (责任编辑:admin) |