|
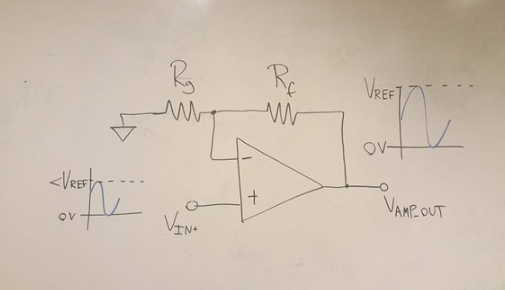
正如我们上次讨论的,我们将介绍ADAQ798x集成ADC驱动器的几个常见且有用的配置选项,如何设计它们,以及在设计时需要注意什么。在今天的文章中,我们将讨论如何使用常见的同相配置将ADAQ798x与小于ADC输入范围0 V至VREF的单极性输入源连接。 同相配置 ADC在0 V和V之间转换输入裁判.这意味着ADC驱动器的输出也必须为0 V至VREF允许系统利用 2 的全部范围16ADAQ798x提供的代码。ADAQ798x的集成ADC驱动器可提供增益,为幅度较小的信号提供必要的升压。 这就是同相配置的用武之地!这种配置为单极性信号提供增益、高输入阻抗,并且只需要两个额外的电阻。
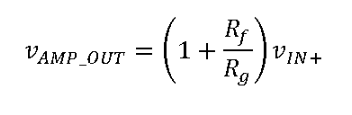
许多系统设计人员已经知道同相配置的工作原理,但我们将在ADAQ798x的背景下进行研究,以及配置如何影响关键系统性能参数,包括系统噪声、信噪比(SNR)和总谐波失真(THD)。 一、我们如何选择电阻R。f和 Rg给定应用的输入范围和基准电压?ADC驱动器输出端的电压(vAMP_OUT) 是:
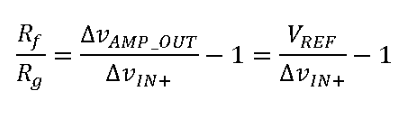
鉴于vAMP_OUT介于0 V和VREF之间,则很容易计算出应用输入范围(vIN+)的Rf与Rg之比:
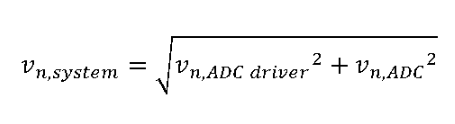
计算 R 后f到 Rg比率,则必须选择其特定值。这些电阻的“正确”值取决于应用,必须选择这些电阻以平衡系统噪声性能与功耗、失真和放大器稳定性。R 值较低f从而降低噪声,但也会导致从ADC驱动器的输出中消耗更多的电流(增加功耗)。使用较高的 R 值f可以限制这种功耗,但会导致增加系统噪声和潜在的稳定性问题。 电阻产生的噪声量与其电阻成正比。较大的电阻会产生更多的噪声,并且会影响系统的本底噪声和交流性能规格(如SNR)。总系统噪声可以通过取电路中各个噪声源(包括电阻、ADC驱动器和ADC本身)的平方根来计算:
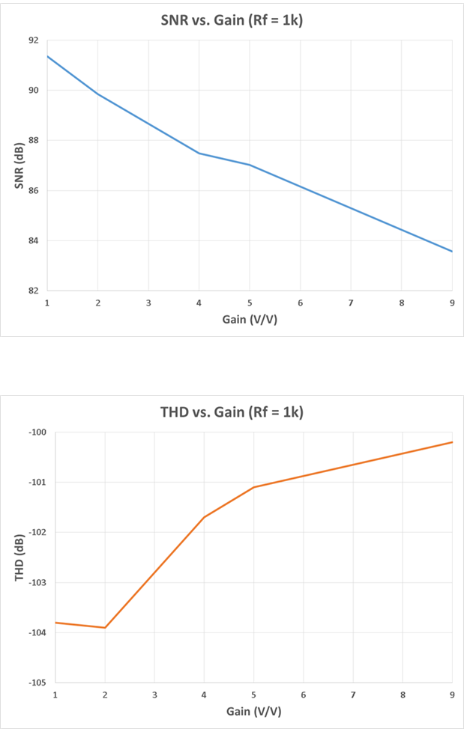
其中 vn,系统是系统均方根本底噪声,Vn,模数转换器驱动器是ADC驱动器电路(包括外部电阻)的总噪声,v。n,ADC是ADC的本底噪声规格。 ADAQ7980/ADAQ7988数据手册说明了如何计算电压n,模数转换器驱动器(参见噪声考虑因素和信号建立),并给出vn,ADC作为 44.4 μV有效值用于5 V基准电压源。CN-0393还解释了如何根据系统总噪声计算系统的预期SNR(参见系统噪声分析)。为了简洁起见,我们不会在这里再次进行这些计算,但我们将在这里给出另一个示例。 让我们看一下ADAQ7980在使用0 V基准电压源时需要直接与输出范围为2 V至5.5 V的传感器接口的情况。由于传感器的输出幅度等于ADC输入范围的一半,因此ADC驱动器的增益应设置为2。这需要 Rf等于 Rg,但选择了Rf有些灵活。首先,让我们看看 R 的不同值是如何不同的f(和 Rg) 影响系统的本底噪声和相应的预期 SNR: Rf, Rg (Ω)vn,system (μVRMS)计算信噪比 (dBFS)50053.390.41k54.390.22k56.489.95k62.289.0如您所见,当使用较高的R值时,系统噪声会增加,SNR会降低f和 Rg.增加增益也会降低SNR性能,因为它会增加ADC驱动器的输入电压噪声和R贡献的有效噪声。g.下图显示了使用R时各种增益的SNR和THD(总谐波失真)的测量结果f= 1 kΩ(输入频率 = 10 kHz)。
然而,选择较小电阻的缺点之一是ADC驱动器需要通过反馈网络提供更多电流(从而提供更多功率)。通过R的瞬时电流f和 Rg是 vAMP_OUT除以 R 之和f和 Rg.该电流会增加系统的总功耗,在低功耗应用中应加以限制。 结语 这种配置的一个好处是其输入阻抗非常大,因为源直接连接到ADC驱动器的同相节点。这对于输出阻抗非常大的源特别有用。我们将看到,对于其他配置,情况并非总是如此。 虽然同相配置可以提供增益,但也存在一些实际限制。首先,如本模拟对话文章所述,ADC驱动器必须保持一定的大信号和小信号带宽,以实现ADC的正向和反向建立要求。带宽与闭环增益成反比。系统噪声也会随着增益的增加而增加,并且在某一点上会大大降低性能,如果没有大量的滤波,就无法实现(我们将在本系列的后面介绍)。 此外,对于需要极低失调、增益误差和漂移的应用,请确保使用具有足够容差和TCR规格的精密电阻。如果可能,请使用匹配的电阻器网络,该网络指定其各个电阻器之间的电阻和TCR跟踪(例如,LT5400系列)。CN-0393更详细地探讨了这一概念。另请注意,ADC驱动器的输入偏置电流将流过Rf和 Rg,这将在系统中产生电压偏移。可以在ADC驱动器的同相节点和输入源之间放置一个电阻,以平衡这些失调,但请记住,该电阻也会给系统增加噪声! 审核编辑:郭婷 全文完 (责任编辑:admin) |